 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Localization and Control on Roads with Prior Grade Map
Paper and Code
Sep 11, 2018
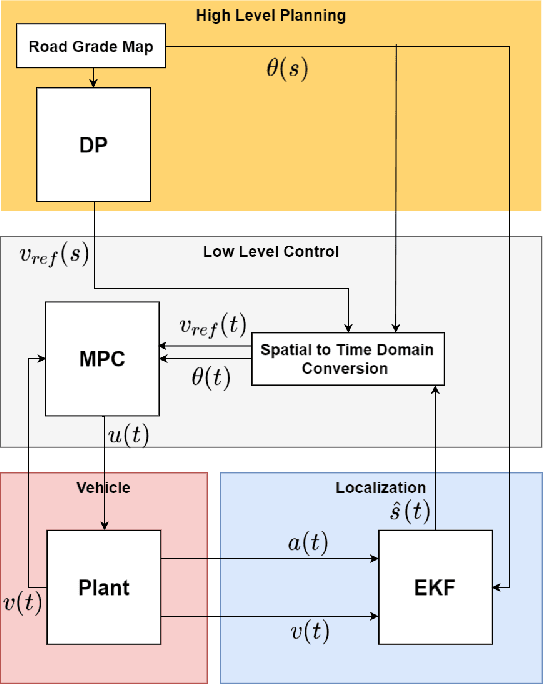
We propose a map-aided vehicle localization method for GPS-denied environments. This approach exploits prior knowledge of the road grade map and vehicle on-board sensor measurements to accurately estimate the longitudinal position of the vehicle. Real-time localization is crucial to systems that utilize position-dependent information for planning and control. We validate the effectiveness of the localization method on a hierarchical control system. The higher level planner optimizes the vehicle velocity to minimize the energy consumption for a given route by employing traffic condition and road grade data. The lower level is a cruise control system that tracks the position-dependent optimal reference velocity. Performance of the proposed localization algorithm is evaluated using both simulations and experiments.