 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed State Estimation for Vision-Based Cooperative Slung Load Transportation in GPS-Denied Environments
Mar 04, 2026Transporting heavy or oversized slung loads using rotorcraft has traditionally relied on single-aircraft systems, which limits both payload capacity and control authority. Cooperative multilift using teams of rotorcraft offers a scalable and efficient alternative, especially for infrequent but challenging "long-tail" payloads without the need of building larger and larger rotorcraft. Most prior multilift research assumes GPS availability, uses centralized estimation architectures, or relies on controlled laboratory motion-capture setups. As a result, these methods lack robustness to sensor loss and are not viable in GPS-denied or operationally constrained environments. This paper addresses this limitation by presenting a distributed and decentralized payload state estimation framework for vision-based multilift operations. Using onboard monocular cameras, each UAV detects a fiducial marker on the payload and estimates its relative pose. These measurements are fused via a Distributed and Decentralized Extended Information Filter (DDEIF), enabling robust and scalable estimation that is resilient to individual sensor dropouts. This payload state estimate is then used for closed-loop trajectory tracking control. Monte Carlo simulation results in Gazebo show the effectiveness of the proposed approach, including the effect of communication loss during flight.
* In proceedings of the 2026 AIAA SciTech Forum, Session: Intelligent Systems-27
Inverted Landing in a Small Aerial Robot via Deep Reinforcement Learning for Triggering and Control of Rotational Maneuvers
Sep 22, 2022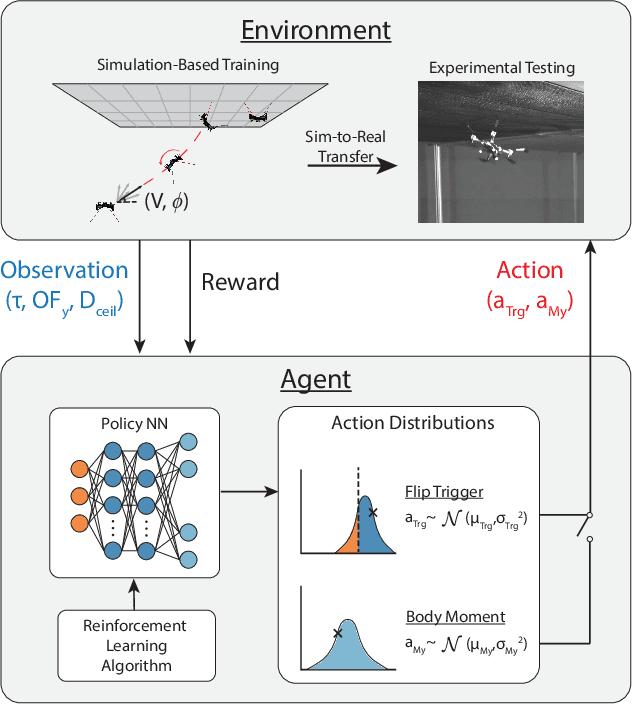
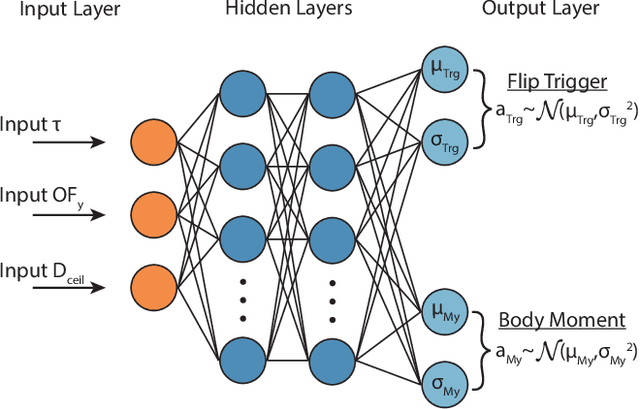
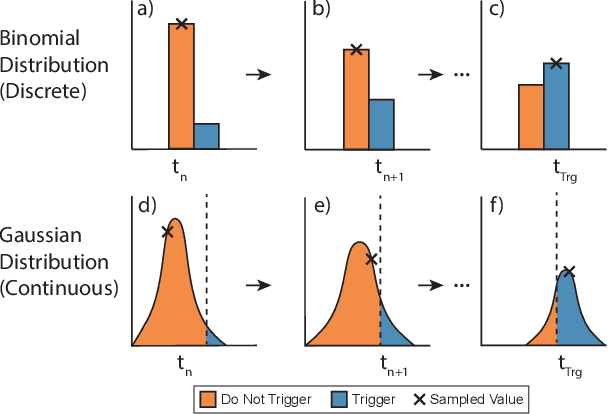

Inverted landing in a rapid and robust manner is a challenging feat for aerial robots, especially while depending entirely on onboard sensing and computation. In spite of this, this feat is routinely performed by biological fliers such as bats, flies, and bees. Our previous work has identified a direct causal connection between a series of onboard visual cues and kinematic actions that allow for reliable execution of this challenging aerobatic maneuver in small aerial robots. In this work, we first utilized Deep Reinforcement Learning and a physics-based simulation to obtain a general, optimal control policy for robust inverted landing starting from any arbitrary approach condition. This optimized control policy provides a computationally-efficient mapping from the system's observational space to its motor command action space, including both triggering and control of rotational maneuvers. This was done by training the system over a large range of approach flight velocities that varied with magnitude and direction. Next, we performed a sim-to-real transfer and experimental validation of the learned policy via domain randomization, by varying the robot's inertial parameters in the simulation. Through experimental trials, we identified several dominant factors which greatly improved landing robustness and the primary mechanisms that determined inverted landing success. We expect the learning framework developed in this study can be generalized to solve more challenging tasks, such as utilizing noisy onboard sensory data, landing on surfaces of various orientations, or landing on dynamically-moving surfaces.
Optimal Inverted Landing in a Small Aerial Robot with Varied Approach Velocities and Landing Gear Designs
Nov 05, 2021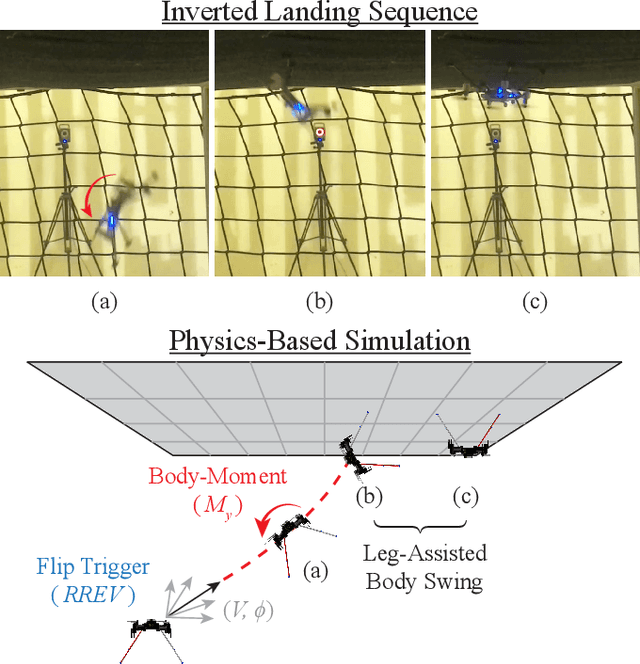
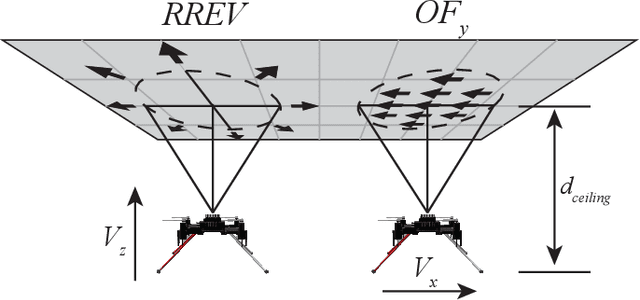
Inverted landing is a challenging feat to perform in aerial robots, especially without external positioning. However, it is routinely performed by biological fliers such as bees, flies, and bats. Our previous observations of landing behaviors in flies suggest an open-loop causal relationship between their putative visual cues and the kinematics of the aerial maneuvers executed. For example, the degree of rotational maneuver (therefore the body inversion prior to touchdown) and the amount of leg-assisted body swing both depend on the flies' initial body states while approaching the ceiling. In this work, by using a physics-based simulation with experimental validation, we systematically investigated how optimized inverted landing maneuvers depend on the initial approach velocities with varied magnitude and direction. This was done by analyzing the putative visual cues (that can be derived from onboard measurements) during optimal maneuvering trajectories. We identified a three-dimensional policy region, from which a mapping to a global inverted landing policy can be developed without the use of external positioning data. In addition, we also investigated the effects of an array of landing gear designs on the optimized landing performance and identified their advantages and disadvantages. The above results have been partially validated using limited experimental testing and will continue to inform and guide our future experiments, for example by applying the calculated global policy.