 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Inverted Landing in a Small Aerial Robot with Varied Approach Velocities and Landing Gear Designs
Paper and Code
Nov 05, 2021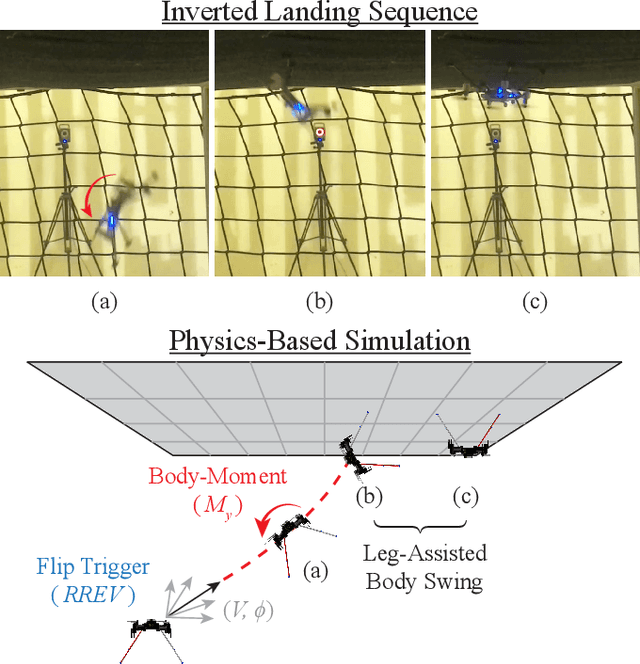
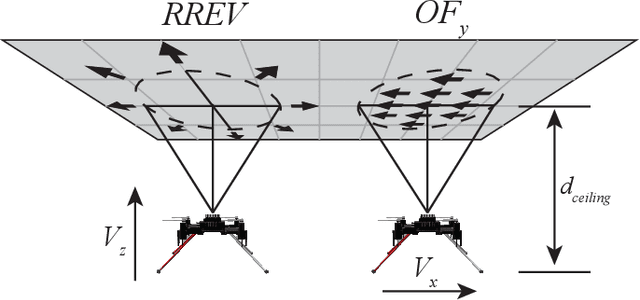
Inverted landing is a challenging feat to perform in aerial robots, especially without external positioning. However, it is routinely performed by biological fliers such as bees, flies, and bats. Our previous observations of landing behaviors in flies suggest an open-loop causal relationship between their putative visual cues and the kinematics of the aerial maneuvers executed. For example, the degree of rotational maneuver (therefore the body inversion prior to touchdown) and the amount of leg-assisted body swing both depend on the flies' initial body states while approaching the ceiling. In this work, by using a physics-based simulation with experimental validation, we systematically investigated how optimized inverted landing maneuvers depend on the initial approach velocities with varied magnitude and direction. This was done by analyzing the putative visual cues (that can be derived from onboard measurements) during optimal maneuvering trajectories. We identified a three-dimensional policy region, from which a mapping to a global inverted landing policy can be developed without the use of external positioning data. In addition, we also investigated the effects of an array of landing gear designs on the optimized landing performance and identified their advantages and disadvantages. The above results have been partially validated using limited experimental testing and will continue to inform and guide our future experiments, for example by applying the calculated global policy.