 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Visualization Policies of Augmented Reality for Human-Robot Collaboration
Nov 13, 2022In human-robot collaboration domains, augmented reality (AR) technologies have enabled people to visualize the state of robots. Current AR-based visualization policies are designed manually, which requires a lot of human efforts and domain knowledge. When too little information is visualized, human users find the AR interface not useful; when too much information is visualized, they find it difficult to process the visualized information. In this paper, we develop a framework, called VARIL, that enables AR agents to learn visualization policies (what to visualize, when, and how) from demonstrations. We created a Unity-based platform for simulating warehouse environments where human-robot teammates collaborate on delivery tasks. We have collected a dataset that includes demonstrations of visualizing robots' current and planned behaviors. Results from experiments with real human participants show that, compared with competitive baselines from the literature, our learned visualization strategies significantly increase the efficiency of human-robot teams, while reducing the distraction level of human users. VARIL has been demonstrated in a built-in-lab mock warehouse.
Learning to Guide Human Attention on Mobile Telepresence Robots with 360 degree Vision
Sep 21, 2021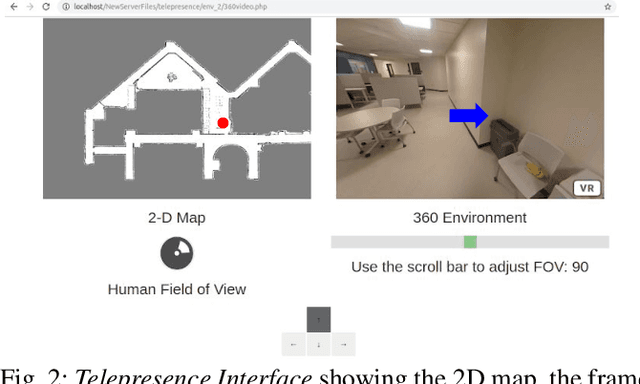
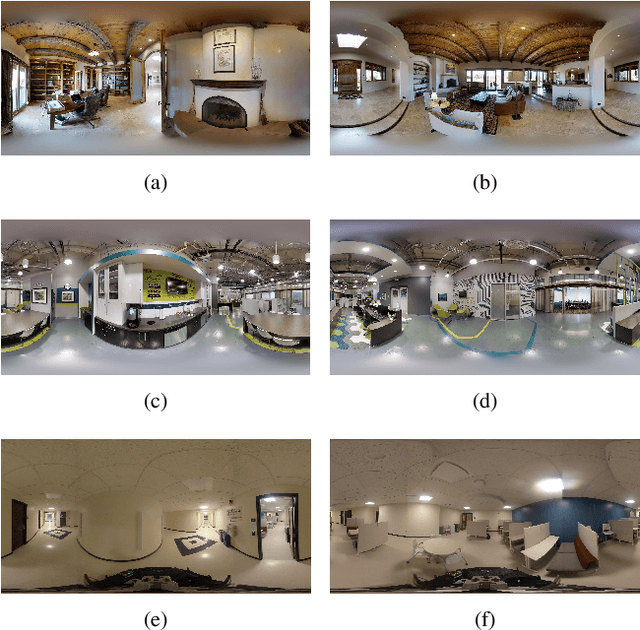
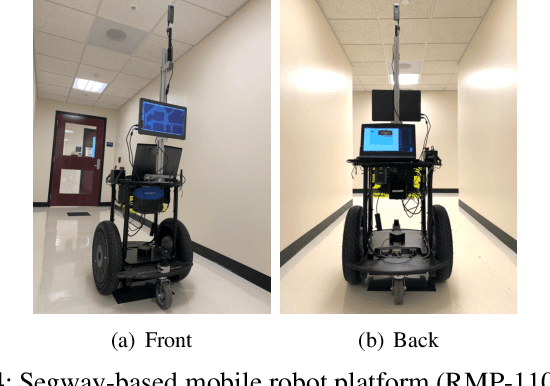
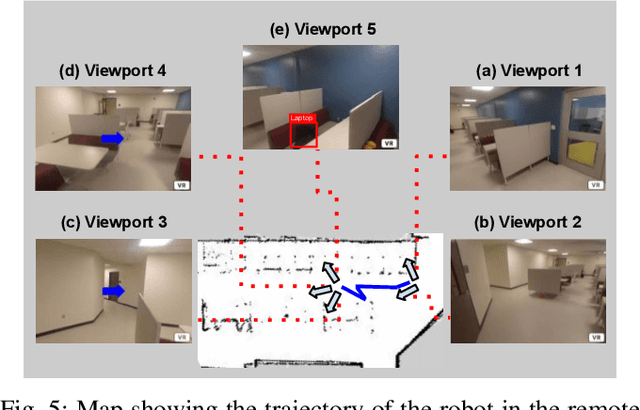
Mobile telepresence robots (MTRs) allow people to navigate and interact with a remote environment that is in a place other than the person's true location. Thanks to the recent advances in 360 degree vision, many MTRs are now equipped with an all-degree visual perception capability. However, people's visual field horizontally spans only about 120 degree of the visual field captured by the robot. To bridge this observability gap toward human-MTR shared autonomy, we have developed a framework, called GHAL360, to enable the MTR to learn a goal-oriented policy from reinforcements for guiding human attention using visual indicators. Three telepresence environments were constructed using datasets that are extracted from Matterport3D and collected from a real robot respectively. Experimental results show that GHAL360 outperformed the baselines from the literature in the efficiency of a human-MTR team completing target search tasks.