 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Low-Gravity Planetary Exploration using Reinforcement Learning for Walking, Jumping, and In-flight Attitude Control
May 23, 2026This paper presents reinforcement learning (RL) policies for dynamic quadrupedal locomotion in planetary exploration scenarios. Building on a taskoptimized quadruped with a 5-bar leg design, we develop RL policies for walking, vertical jumping, forward jumping, and in-flight attitude control, explicitly tailored to the reduced gravity on Mars. These policies jointly enable such robots to overcome obstacles larger than themselves through coordinated jumping and precise in-flight reorientation for safe landings. We demonstrate Sim2Real transfer of the attitude control policy on the Olympus quadruped through single-axis reorientation tests, while all locomotion policies are validated in simulation. A complete Mars exploration mission scenario demonstrates coordinated policy deployment across challenging terrain. Experimental results show 90° attitude reorientation in 2.6 seconds, with simulations demonstrating 3.1 meter vertical jumps and 3.9 meter forward jumps under Martian gravity conditions. - Supplementary video: https://www.youtube.com/watch?v=qlSJ3P87A4A
Olympus: A Jumping Quadruped for Planetary Exploration Utilizing Reinforcement Learning for In-Flight Attitude Control
Mar 05, 2025Exploring planetary bodies with lower gravity, such as the moon and Mars, allows legged robots to utilize jumping as an efficient form of locomotion thus giving them a valuable advantage over traditional rovers for exploration. Motivated by this fact, this paper presents the design, simulation, and learning-based "in-flight" attitude control of Olympus, a jumping legged robot tailored to the gravity of Mars. First, the design requirements are outlined followed by detailing how simulation enabled optimizing the robot's design - from its legs to the overall configuration - towards high vertical jumping, forward jumping distance, and in-flight attitude reorientation. Subsequently, the reinforcement learning policy used to track desired in-flight attitude maneuvers is presented. Successfully crossing the sim2real gap, extensive experimental studies of attitude reorientation tests are demonstrated.
Modeling and In-flight Torso Attitude Stabilization of a Jumping Quadruped
Sep 22, 2024

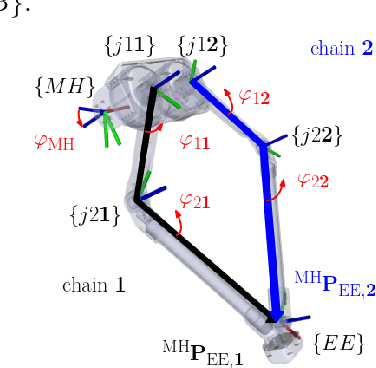
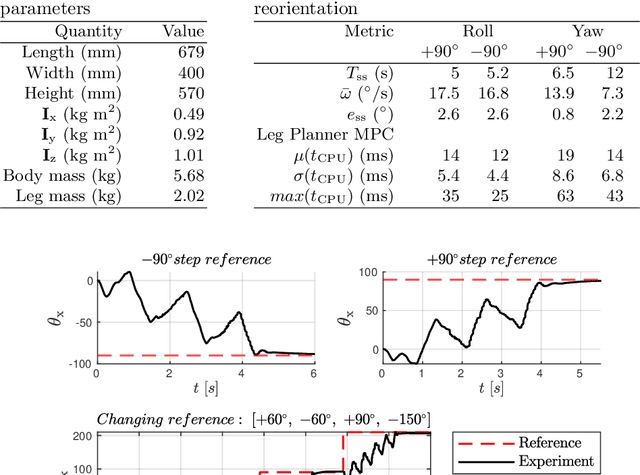
This paper addresses the modeling and attitude control of jumping quadrupeds in low-gravity environments. First, a convex decomposition procedure is presented to generate high-accuracy and low-cost collision geometries for quadrupeds performing agile maneuvers. A hierarchical control architecture is then investigated, separating torso orientation tracking from the generation of suitable, collision-free, corresponding leg motions. Nonlinear Model Predictive Controllers (NMPCs) are utilized in both layers of the controller. To compute the necessary leg motions, a torque allocation strategy is employed that leverages the symmetries of the system to avoid self-collisions and simplify the respective NMPC. To plan periodic trajectories online, a Finite State Machine (FSM)-based weight switching strategy is also used. The proposed controller is first evaluated in simulation, where 90 degree rotations in roll, pitch, and yaw are stabilized in 6.3, 2.4, and 5.5 seconds, respectively. The performance of the controller is further experimentally demonstrated by stabilizing constant and changing orientation references. Overall, this work provides a framework for the development of advanced model-based attitude controllers for jumping legged systems.
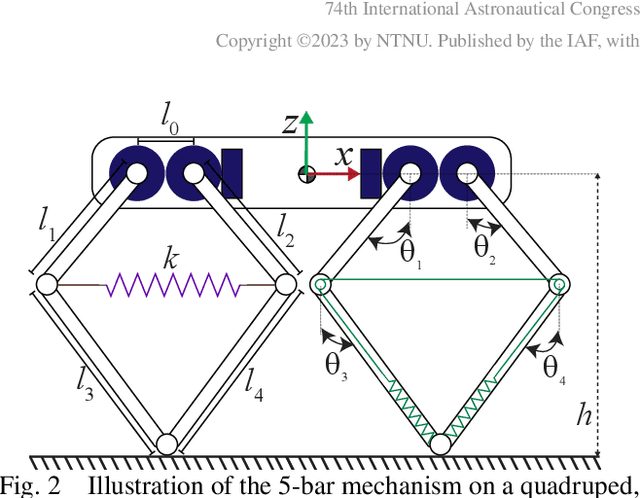
Design and Experimental Verification of a Jumping Legged Robot for Martian Lava Tube Exploration
Nov 07, 2023The potential of Martian lava tubes for resource extraction and habitat sheltering highlights the need for robots capable to undertake the grueling task of their exploration. Driven by this motivation, in this work we introduce a legged robot system optimized for jumping in the low gravity of Mars, designed with leg configurations adaptable to both bipedal and quadrupedal systems. This design utilizes torque-controlled actuators coupled with springs for high-power jumping, robust locomotion, and an energy-efficient resting pose. Key design features include a 5-bar mechanism as leg concept, combined with springs connected by a high-strength cord. The selected 5-bar link lengths and spring stiffness were optimized for maximizing the jump height in Martian gravity and realized as a robot leg. Two such legs combined with a compact body allowed jump testing of a bipedal prototype. The robot is 0.472 m tall and weighs 7.9 kg. Jump testing with significant safety margins resulted in a measured jump height of 1.141 m in Earth's gravity, while a total of 4 jumping experiments are presented. Simulations utilizing the full motor torque and kinematic limits of the design resulted in a maximum possible jump height of 1.52 m in Earth's gravity and 3.63 m in Mars' gravity, highlighting the versatility of jumping as a form of locomotion and overcoming obstacles in lower gravity.
Terrain Recognition and Contact Force Estimation through a Sensorized Paw for Legged Robots
Nov 07, 2023This paper introduces the Terrain Recognition And Contact Force Estimation Paw, a compact and sensorized shoe designed for legged robots. The paw end-effector is made of silicon that deforms upon the application of contact forces, while an embedded micro camera is utilized to capture images of the deformed inner surface inside the shoe, and a microphone picks up audio signals. Processed through machine learning techniques, the images are mapped to compute an accurate estimate of the cumulative 3D force vector, while the audio signals are analyzed to identify the terrain class (e.g., gravel, snow). By leveraging its on-edge computation ability, the paw enhances the capabilities of legged robots by providing key information in real-time that can be used to adapt locomotion control strategies. To assess the performance of this novel sensorized paw, we conducted experiments on the data collected through a specially-designed testbed for force estimation, as well as data from recordings of the audio signatures of different terrains interacting with the paw. The results demonstrate the accuracy and effectiveness of the system, highlighting its potential for improving legged robot performance.
Martian Lava Tube Exploration Using Jumping Legged Robots: A Concept Study
Oct 23, 2023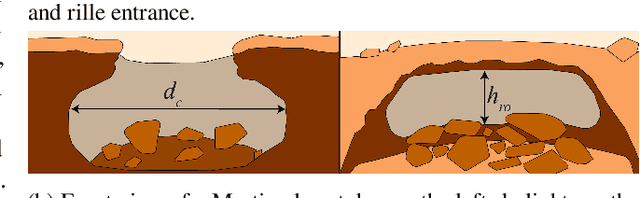


In recent years, robotic exploration has become increasingly important in planetary exploration. One area of particular interest for exploration is Martian lava tubes, which have several distinct features of interest. First, it is theorized that they contain more easily accessible resources such as water ice, needed for in-situ utilization on Mars. Second, lava tubes of significant size can provide radiation and impact shelter for possible future human missions to Mars. Third, lava tubes may offer a protected and preserved view into Mars' geological and possible biological past. However, exploration of these lava tubes poses significant challenges due to their sheer size, geometric complexity, uneven terrain, steep slopes, collapsed sections, significant obstacles, and unstable surfaces. Such challenges may hinder traditional wheeled rover exploration. To overcome these challenges, legged robots and particularly jumping systems have been proposed as potential solutions. Jumping legged robots utilize legs to both walk and jump. This allows them to traverse uneven terrain and steep slopes more easily compared to wheeled or tracked systems. In the context of Martian lava tube exploration, jumping legged robots would be particularly useful due to their ability to jump over big boulders, gaps, and obstacles, as well as to descend and climb steep slopes. This would allow them to explore and map such caves, and possibly collect samples from areas that may otherwise be inaccessible. This paper presents the specifications, design, capabilities, and possible mission profiles for state-of-the-art legged robots tailored to space exploration. Additionally, it presents the design, capabilities, and possible mission profiles of a new jumping legged robot for Martian lava tube exploration that is being developed at the Norwegian University of Science and Technology.