 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMartian Lava Tube Exploration Using Jumping Legged Robots: A Concept Study
Paper and Code
Oct 23, 2023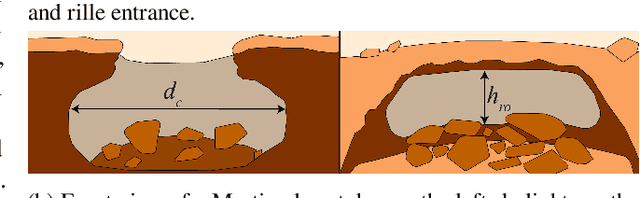

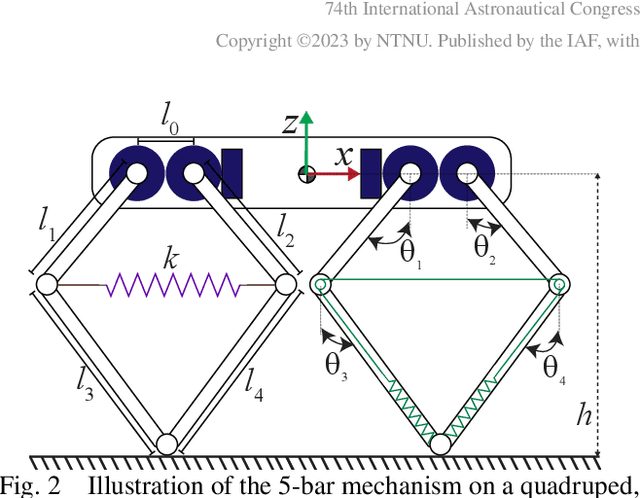

In recent years, robotic exploration has become increasingly important in planetary exploration. One area of particular interest for exploration is Martian lava tubes, which have several distinct features of interest. First, it is theorized that they contain more easily accessible resources such as water ice, needed for in-situ utilization on Mars. Second, lava tubes of significant size can provide radiation and impact shelter for possible future human missions to Mars. Third, lava tubes may offer a protected and preserved view into Mars' geological and possible biological past. However, exploration of these lava tubes poses significant challenges due to their sheer size, geometric complexity, uneven terrain, steep slopes, collapsed sections, significant obstacles, and unstable surfaces. Such challenges may hinder traditional wheeled rover exploration. To overcome these challenges, legged robots and particularly jumping systems have been proposed as potential solutions. Jumping legged robots utilize legs to both walk and jump. This allows them to traverse uneven terrain and steep slopes more easily compared to wheeled or tracked systems. In the context of Martian lava tube exploration, jumping legged robots would be particularly useful due to their ability to jump over big boulders, gaps, and obstacles, as well as to descend and climb steep slopes. This would allow them to explore and map such caves, and possibly collect samples from areas that may otherwise be inaccessible. This paper presents the specifications, design, capabilities, and possible mission profiles for state-of-the-art legged robots tailored to space exploration. Additionally, it presents the design, capabilities, and possible mission profiles of a new jumping legged robot for Martian lava tube exploration that is being developed at the Norwegian University of Science and Technology.