 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Entropy and Spatial Adaptation Dynamics of Multilayer Perceptrons for Structural Point Extraction
Jun 08, 2026This paper extends the concept of Learning Entropy (LE) from temporal adaptive systems to spatial learning in multilayer perceptron networks (MLPs) applied to image data. Instead of evaluating image structure directly from gradients or covariance operators, as local neighborhood methods do, the proposed approach analyzes the learning process itself through Learning Entropy. An MLP is trained to predict the intensity of a center pixel from its surrounding spatial context, while LE is evaluated from the incremental adaptation of neural weights during learning across image-derived samples. The resulting Spatial Learning Entropy Maps (SLEM) identify unusual image points and regions that induce strong adaptation of the neural network and therefore have an important role in the learning process. The results indicate that spatial Learning Entropy provides a complementary perspective to conventional feature extraction and explainability methods by highlighting spatial locations that are particularly informative for network learning. Spatial Learning Entropy provides a complementary perspective to conventional feature extraction and explainability methods by identifying image points and regions according to their learning impact rather than their local structural properties. The proposed framework may open new directions for learning-driven image or scene analysis in computer vision, manufacturing, and robotics.
A Letter on Convergence of In-Parameter-Linear Nonlinear Neural Architectures with Gradient Learnings
Nov 25, 2021This letter summarizes and proves the concept of bounded-input bounded-state (BIBS) stability for weight convergence of a broad family of in-parameter-linear nonlinear neural architectures as it generally applies to a broad family of incremental gradient learning algorithms. A practical BIBS convergence condition results from the derived proofs for every individual learning point or batches for real-time applications.
An Approach to Stable Gradient Descent Adaptation of Higher-Order Neural Units
Jun 23, 2016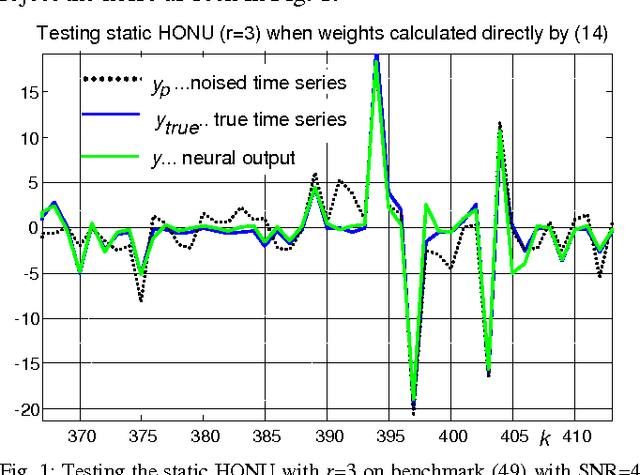
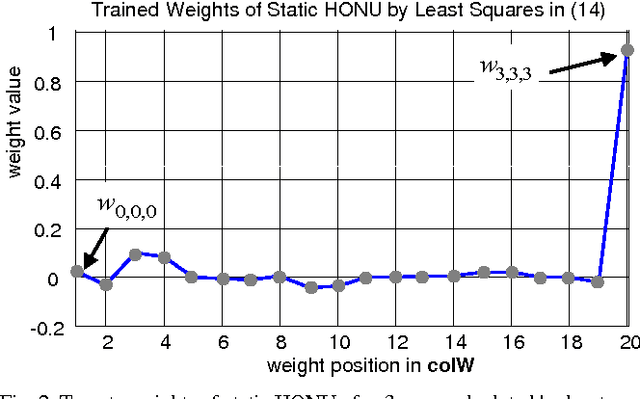
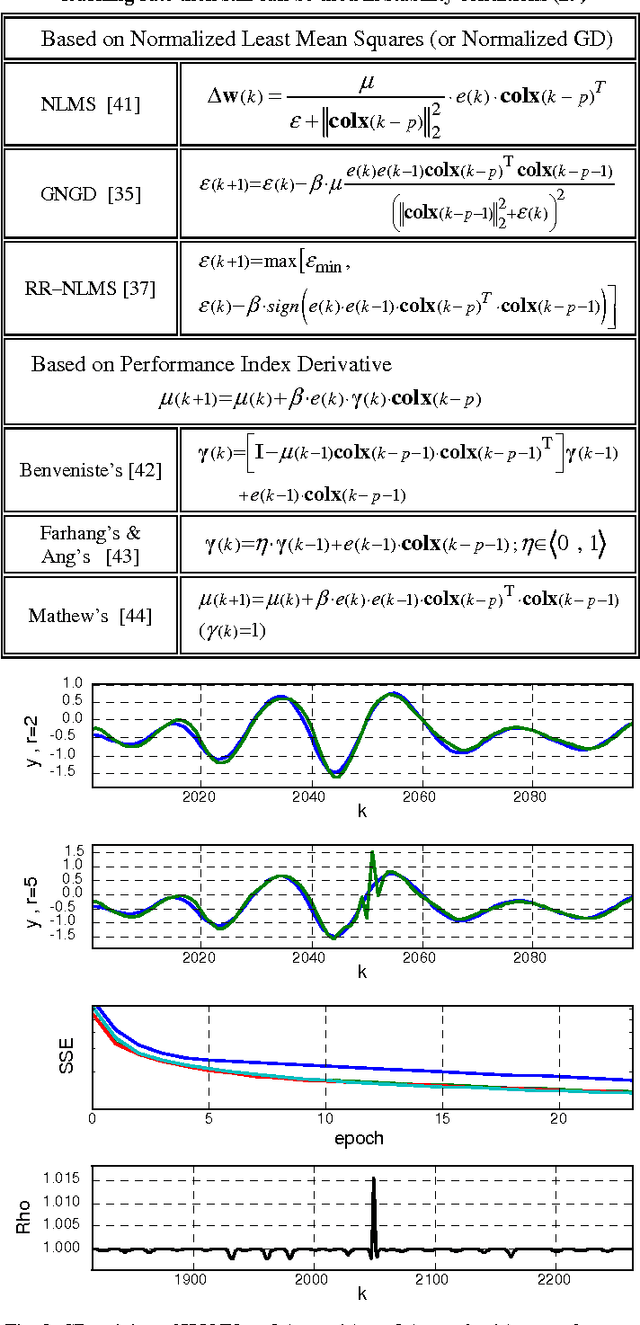
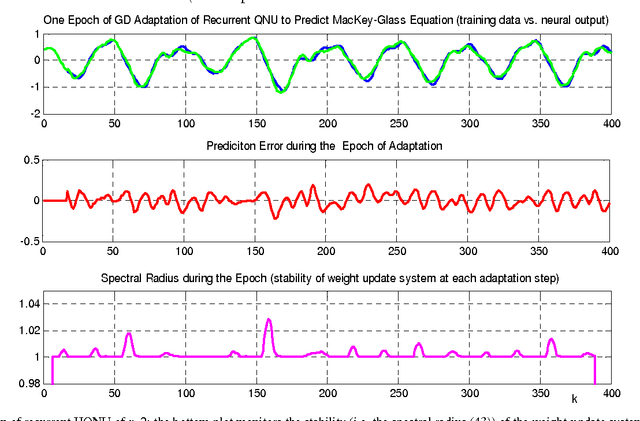
Stability evaluation of a weight-update system of higher-order neural units (HONUs) with polynomial aggregation of neural inputs (also known as classes of polynomial neural networks) for adaptation of both feedforward and recurrent HONUs by a gradient descent method is introduced. An essential core of the approach is based on spectral radius of a weight-update system, and it allows stability monitoring and its maintenance at every adaptation step individually. Assuring stability of the weight-update system (at every single adaptation step) naturally results in adaptation stability of the whole neural architecture that adapts to target data. As an aside, the used approach highlights the fact that the weight optimization of HONU is a linear problem, so the proposed approach can be generally extended to any neural architecture that is linear in its adaptable parameters.
* 2016, 13 pages
Neural Network Approach to Railway Stand Lateral Skew Control
Feb 28, 2014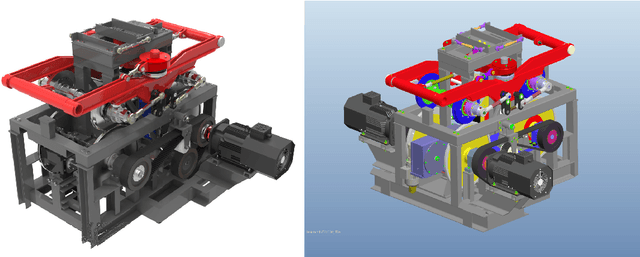
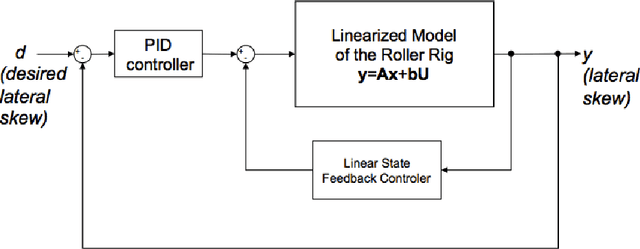
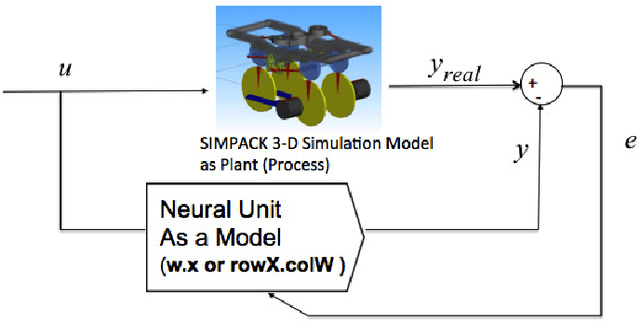
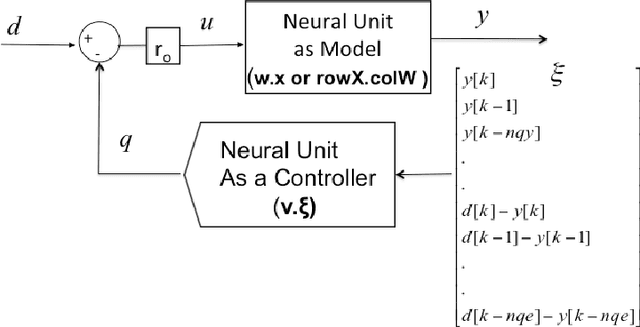
The paper presents a study of an adaptive approach to lateral skew control for an experimental railway stand. The preliminary experiments with the real experimental railway stand and simulations with its 3-D mechanical model, indicates difficulties of model-based control of the device. Thus, use of neural networks for identification and control of lateral skew shall be investigated. This paper focuses on real-data based modeling of the railway stand by various neural network models, i.e; linear neural unit and quadratic neural unit architectures. Furthermore, training methods of these neural architectures as such, real-time-recurrent-learning and a variation of back-propagation-through-time are examined, accompanied by a discussion of the produced experimental results.