 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Network Approach to Railway Stand Lateral Skew Control
Feb 28, 2014
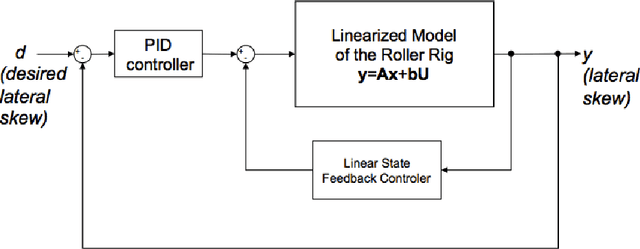
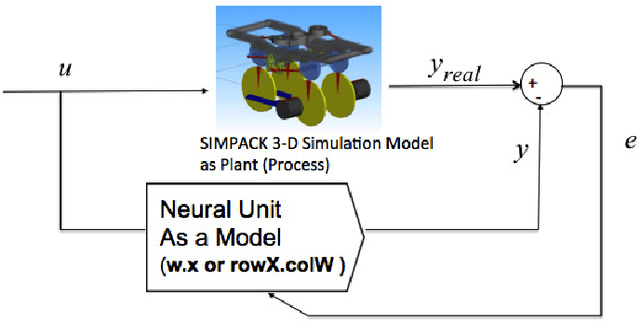
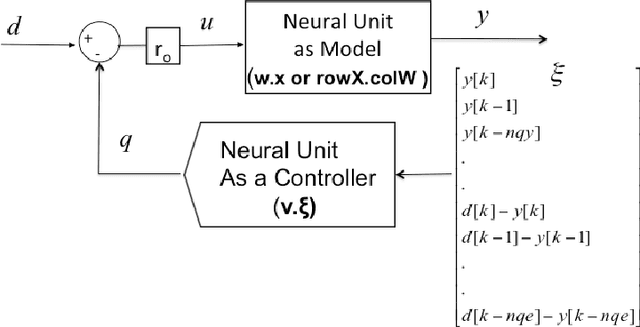
The paper presents a study of an adaptive approach to lateral skew control for an experimental railway stand. The preliminary experiments with the real experimental railway stand and simulations with its 3-D mechanical model, indicates difficulties of model-based control of the device. Thus, use of neural networks for identification and control of lateral skew shall be investigated. This paper focuses on real-data based modeling of the railway stand by various neural network models, i.e; linear neural unit and quadratic neural unit architectures. Furthermore, training methods of these neural architectures as such, real-time-recurrent-learning and a variation of back-propagation-through-time are examined, accompanied by a discussion of the produced experimental results.