 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM Reasoner and Automated Planner: A new NPC approach
Jan 17, 2025



In domains requiring intelligent agents to emulate plausible human-like behaviour, such as formative simulations, traditional techniques like behaviour trees encounter significant challenges. Large Language Models (LLMs), despite not always yielding optimal solutions, usually offer plausible and human-like responses to a given problem. In this paper, we exploit this capability and propose a novel architecture that integrates an LLM for decision-making with a classical automated planner that can generate sound plans for that decision. The combination aims to equip an agent with the ability to make decisions in various situations, even if they were not anticipated during the design phase.
A Roadmap to Guide the Integration of LLMs in Hierarchical Planning
Jan 14, 2025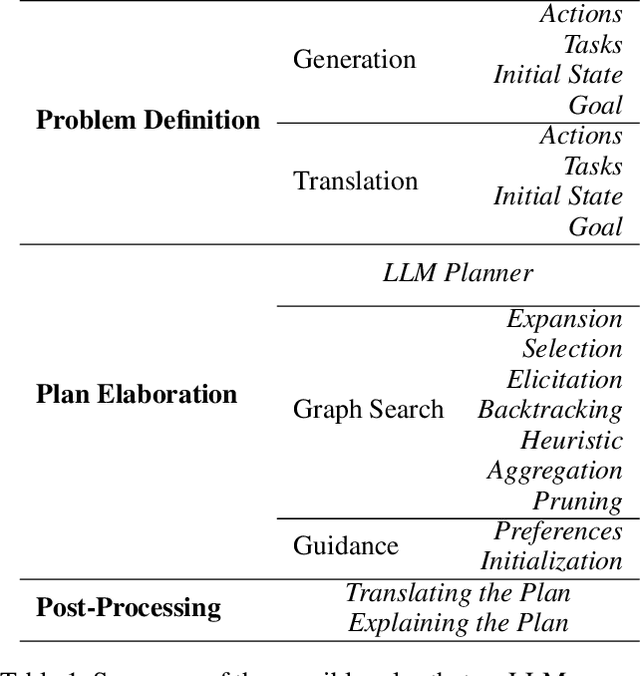
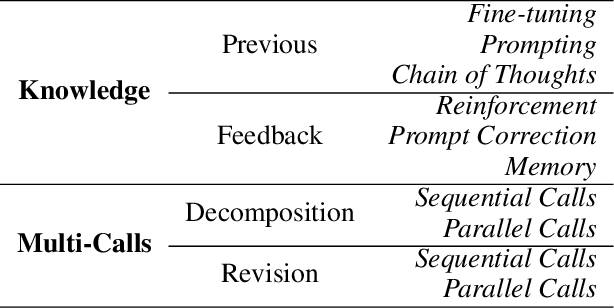
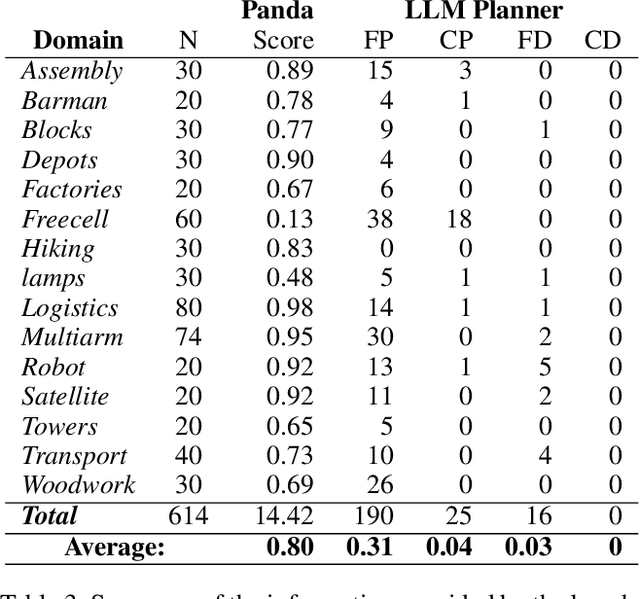
Recent advances in Large Language Models (LLMs) are fostering their integration into several reasoning-related fields, including Automated Planning (AP). However, their integration into Hierarchical Planning (HP), a subfield of AP that leverages hierarchical knowledge to enhance planning performance, remains largely unexplored. In this preliminary work, we propose a roadmap to address this gap and harness the potential of LLMs for HP. To this end, we present a taxonomy of integration methods, exploring how LLMs can be utilized within the HP life cycle. Additionally, we provide a benchmark with a standardized dataset for evaluating the performance of future LLM-based HP approaches, and present initial results for a state-of-the-art HP planner and LLM planner. As expected, the latter exhibits limited performance (3\% correct plans, and none with a correct hierarchical decomposition) but serves as a valuable baseline for future approaches.