 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeESAD: Endoscopic Surgeon Action Detection Dataset
Jun 12, 2020
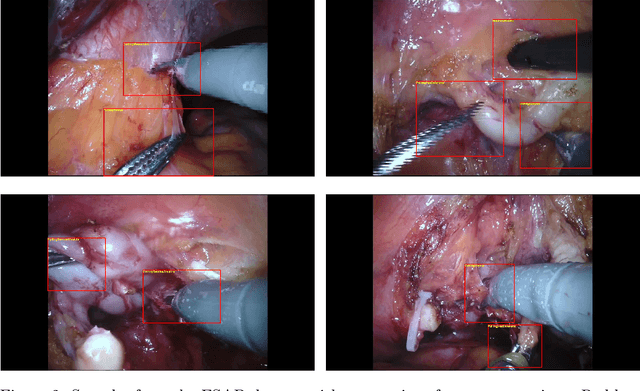
In this work, we take aim towards increasing the effectiveness of surgical assistant robots. We intended to make assistant robots safer by making them aware about the actions of surgeon, so it can take appropriate assisting actions. In other words, we aim to solve the problem of surgeon action detection in endoscopic videos. To this, we introduce a challenging dataset for surgeon action detection in real-world endoscopic videos. Action classes are picked based on the feedback of surgeons and annotated by medical professional. Given a video frame, we draw bounding box around surgical tool which is performing action and label it with action label. Finally, we presenta frame-level action detection baseline model based on recent advances in ob-ject detection. Results on our new dataset show that our presented dataset provides enough interesting challenges for future method and it can serveas strong benchmark corresponding research in surgeon action detection in endoscopic videos.