 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Human Robot-Interaction using Switched Model Reference Admittance Control
Nov 27, 2022



Physical Human-Robot Interaction (pHRI) task involves tight coupling between safety constraints and compliance with human intentions. In this paper, a novel switched model reference admittance controller is developed to maintain compliance with the external force while upholding safety constraints in the workspace for an n-link manipulator involved in pHRI. A switched reference model is designed for the admittance controller to generate the reference trajectory within the safe workspace. The stability analysis of the switched reference model is carried out by an appropriate selection of the Common Quadratic Lyapunov Function (CQLF) so that asymptotic convergence of the trajectory tracking error is ensured. The efficacy of the proposed controller is validated in simulation on a two-link robot manipulator.
Robust Artificial Delay based Impedance Control of Robotic Manipulators with Uncertain Dynamics
Aug 20, 2022



In this paper an artificial delay based impedance controller is proposed for robotic manipulators with uncertainty in dynamics. The control law unites the time delayed estimation (TDE) framework with a second order switching controller of super twisting algorithm (STA) type via a novel generalized filtered tracking error (GFTE). While time delayed estimation framework eliminates the need for accurate modelling of robot dynamics by estimating the uncertain robot dynamics and interaction forces from immediate past data of state and control effort, the second order switching control law in the outer loop provides robustness against the time delayed estimation (TDE) error that arises due to approximation of the manipulator dynamics. Thus, the proposed control law tries to establish a desired impedance model between the robot end effector variables i.e. force and motion in presence of uncertainties, both when it is encountering smooth contact forces and during free motion. Simulation results for a two link manipulator using the proposed controller along with convergence analysis are shown to validate the proposition.
Efficient detection of adversarial images
Jul 09, 2020



In this paper, detection of deception attack on deep neural network (DNN) based image classification in autonomous and cyber-physical systems is considered. Several studies have shown the vulnerability of DNN to malicious deception attacks. In such attacks, some or all pixel values of an image are modified by an external attacker, so that the change is almost invisible to the human eye but significant enough for a DNN-based classifier to misclassify it. This paper first proposes a novel pre-processing technique that facilitates the detection of such modified images under any DNN-based image classifier as well as the attacker model. The proposed pre-processing algorithm involves a certain combination of principal component analysis (PCA)-based decomposition of the image, and random perturbation based detection to reduce computational complexity. Next, an adaptive version of this algorithm is proposed where a random number of perturbations are chosen adaptively using a doubly-threshold policy, and the threshold values are learnt via stochastic approximation in order to minimize the expected number of perturbations subject to constraints on the false alarm and missed detection probabilities. Numerical experiments show that the proposed detection scheme outperforms a competing algorithm while achieving reasonably low computational complexity.
Formation of Multiple Groups of Mobile Robots Using Sliding Mode Control
May 29, 2015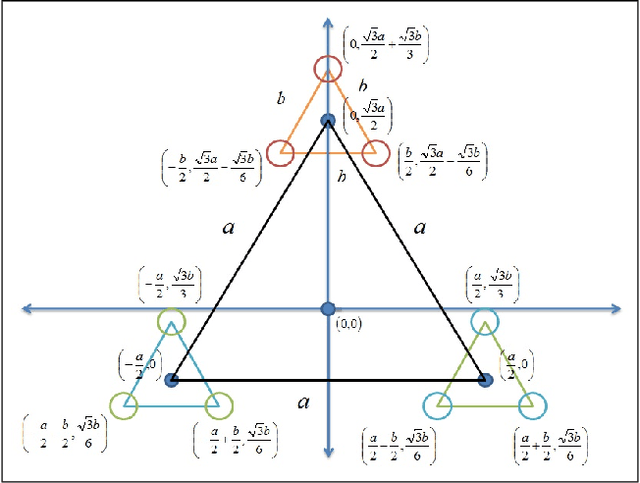
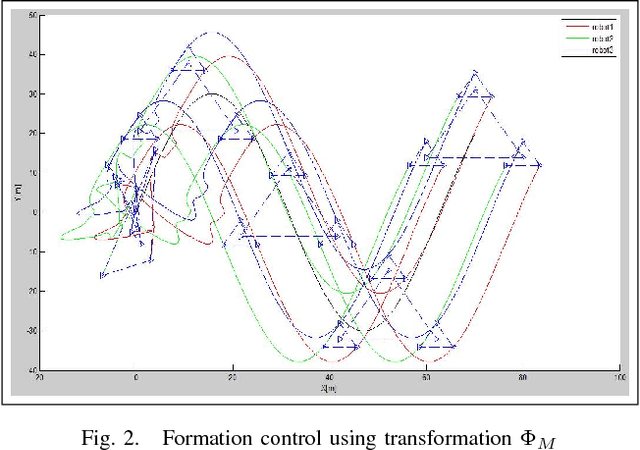
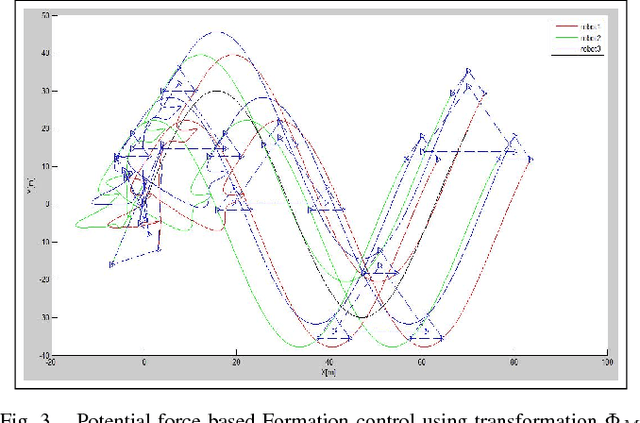
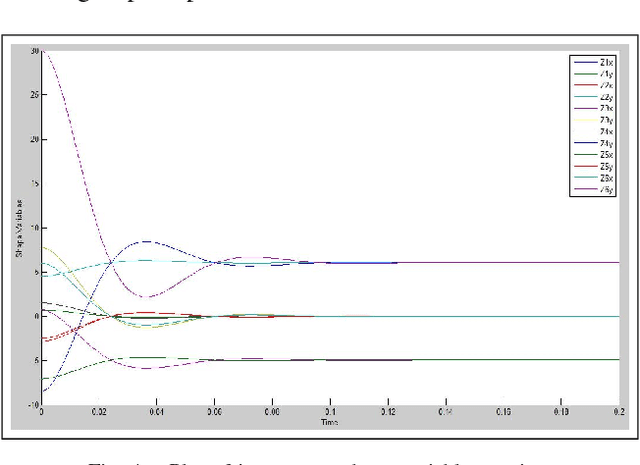
Formation control of multiple groups of agents finds application in large area navigation by generating different geometric patterns and shapes, and also in carrying large objects. In this paper, Centroid Based Transformation (CBT) \cite{c39}, has been applied to decompose the combined dynamics of wheeled mobile robots (WMRs) into three subsystems: intra and inter group shape dynamics, and the dynamics of the centroid. Separate controllers have been designed for each subsystem. The gains of the controllers are such chosen that the overall system becomes singularly perturbed system. Then sliding mode controllers are designed on the singularly perturbed system to drive the subsystems on sliding surfaces in finite time. Negative gradient of a potential based function has been added to the sliding surface to ensure collision avoidance among the robots in finite time. The efficacy of the proposed controller is established through simulation results.
Multi Time Scale Behaviour of The Formation of Multiple Groups of Nonholonomic Wheeled Mobile Robots
Dec 25, 2014



Different geometric patterns and shapes are generated using groups of agents, and this needs formation control. In this paper, Centroid Based Transformation (CBT), has been applied to decompose the combined dynamics of nonholonomic Wheeled Mobile Robots (WMRs) into three subsystems: intra and inter group shape dynamics, and the dynamics of the centroid. The intra group shape dynamics can further be partitioned into the shape dynamics of each group, giving the notion of multiple group. Thus separate controllers have been designed for each subsystem. The gains of the controllers are such chosen that the overall system becomes singularly perturbed system, and different subsystems converge to their desired values at different times. Then multi-time scale convergence analysis has been carried out in this paper. Negative gradient of a potential based function has been added to the controller to ensure collision avoidance among the robots. Simulation results have been provided to demonstrate the effectiveness of the proposed controller.