 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormation of Multiple Groups of Mobile Robots Using Sliding Mode Control
May 29, 2015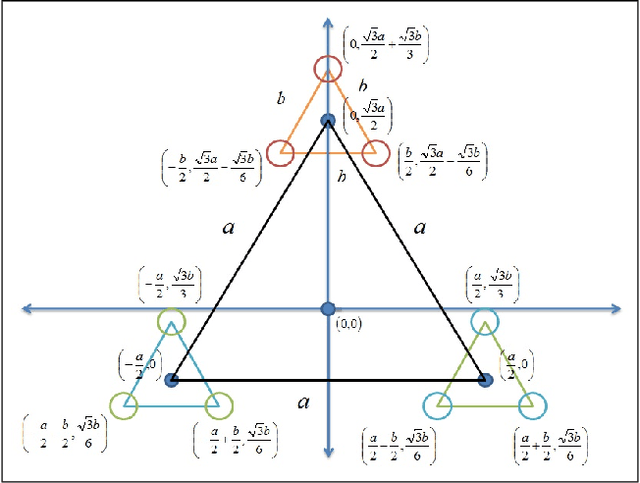
Formation control of multiple groups of agents finds application in large area navigation by generating different geometric patterns and shapes, and also in carrying large objects. In this paper, Centroid Based Transformation (CBT) \cite{c39}, has been applied to decompose the combined dynamics of wheeled mobile robots (WMRs) into three subsystems: intra and inter group shape dynamics, and the dynamics of the centroid. Separate controllers have been designed for each subsystem. The gains of the controllers are such chosen that the overall system becomes singularly perturbed system. Then sliding mode controllers are designed on the singularly perturbed system to drive the subsystems on sliding surfaces in finite time. Negative gradient of a potential based function has been added to the sliding surface to ensure collision avoidance among the robots in finite time. The efficacy of the proposed controller is established through simulation results.
Multi Time Scale Behaviour of The Formation of Multiple Groups of Nonholonomic Wheeled Mobile Robots
Dec 25, 2014



Different geometric patterns and shapes are generated using groups of agents, and this needs formation control. In this paper, Centroid Based Transformation (CBT), has been applied to decompose the combined dynamics of nonholonomic Wheeled Mobile Robots (WMRs) into three subsystems: intra and inter group shape dynamics, and the dynamics of the centroid. The intra group shape dynamics can further be partitioned into the shape dynamics of each group, giving the notion of multiple group. Thus separate controllers have been designed for each subsystem. The gains of the controllers are such chosen that the overall system becomes singularly perturbed system, and different subsystems converge to their desired values at different times. Then multi-time scale convergence analysis has been carried out in this paper. Negative gradient of a potential based function has been added to the controller to ensure collision avoidance among the robots. Simulation results have been provided to demonstrate the effectiveness of the proposed controller.