 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolution of the Probabilistic Lambert Problem: Connections with Optimal Mass Transport, Schrödinger Bridge and Reaction-Diffusion PDEs
Jan 19, 2024Lambert's problem concerns with transferring a spacecraft from a given initial to a given terminal position within prescribed flight time via velocity control subject to a gravitational force field. We consider a probabilistic variant of the Lambert problem where the knowledge of the endpoint constraints in position vectors are replaced by the knowledge of their respective joint probability density functions. We show that the Lambert problem with endpoint joint probability density constraints is a generalized optimal mass transport (OMT) problem, thereby connecting this classical astrodynamics problem with a burgeoning area of research in modern stochastic control and stochastic machine learning. This newfound connection allows us to rigorously establish the existence and uniqueness of solution for the probabilistic Lambert problem. The same connection also helps to numerically solve the probabilistic Lambert problem via diffusion regularization, i.e., by leveraging further connection of the OMT with the Schr\"odinger bridge problem (SBP). This also shows that the probabilistic Lambert problem with additive dynamic process noise is in fact a generalized SBP, and can be solved numerically using the so-called Schr\"odinger factors, as we do in this work. We explain how the resulting analysis leads to solving a boundary-coupled system of reaction-diffusion PDEs where the nonlinear gravitational potential appears as the reaction rate. We propose novel algorithms for the same, and present illustrative numerical results. Our analysis and the algorithmic framework are nonparametric, i.e., we make neither statistical (e.g., Gaussian, first few moments, mixture or exponential family, finite dimensionality of the sufficient statistic) nor dynamical (e.g., Taylor series) approximations.
Neural Schrödinger Bridge with Sinkhorn Losses: Application to Data-driven Minimum Effort Control of Colloidal Self-assembly
Jul 26, 2023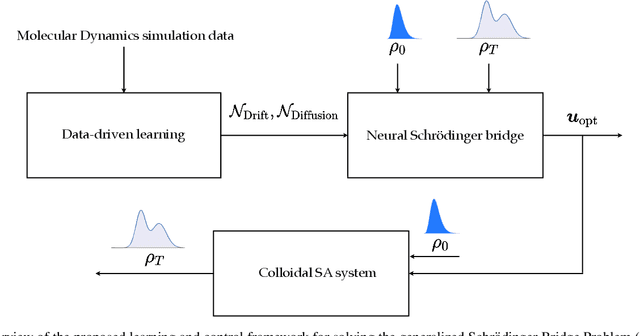
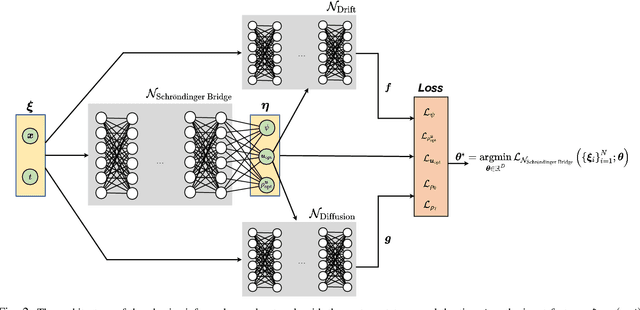
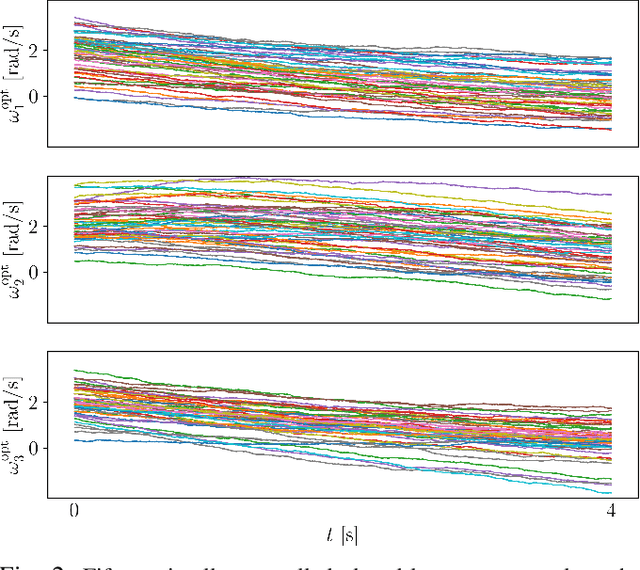
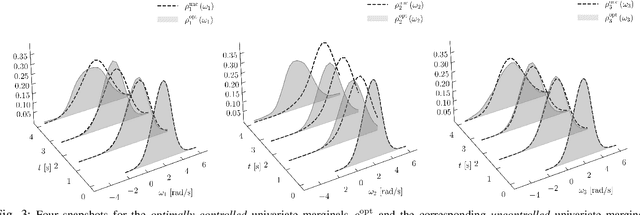
We show that the minimum effort control of colloidal self-assembly can be naturally formulated in the order-parameter space as a generalized Schr\"odinger bridge problem -- a class of fixed-horizon stochastic optimal control problems that originated in the works of Erwin Schr\"odinger in the early 1930s. In recent years, this class of problems has seen a resurgence of research activities in control and machine learning communities. Different from the existing literature on the theory and computation for such problems, the controlled drift and diffusion coefficients for colloidal self-assembly are typically non-affine in control, and are difficult to obtain from physics-based modeling. We deduce the conditions of optimality for such generalized problems, and show that the resulting system of equations is structurally very different from the existing results in a way that standard computational approaches no longer apply. Thus motivated, we propose a data-driven learning and control framework, named `neural Schr\"odinger bridge', to solve such generalized Schr\"odinger bridge problems by innovating on recent advances in neural networks. We illustrate the effectiveness of the proposed framework using a numerical case study of colloidal self-assembly. We learn the controlled drift and diffusion coefficients as two neural networks using molecular dynamics simulation data, and then use these two to train a third network with Sinkhorn losses designed for distributional endpoint constraints, specific for this class of control problems.
Optimal Mass Transport over the Euler Equation
Apr 02, 2023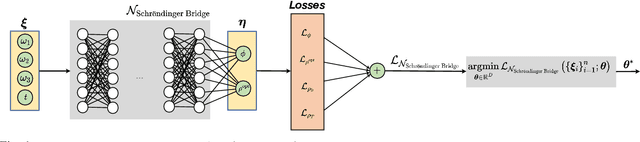
We consider the finite horizon optimal steering of the joint state probability distribution subject to the angular velocity dynamics governed by the Euler equation. The problem and its solution amounts to controlling the spin of a rigid body via feedback, and is of practical importance, for example, in angular stabilization of a spacecraft with stochastic initial and terminal states. We clarify how this problem is an instance of the optimal mass transport (OMT) problem with bilinear prior drift. We deduce both static and dynamic versions of the Eulerian OMT, and provide analytical and numerical results for the synthesis of the optimal controller.
Proximal Mean Field Learning in Shallow Neural Networks
Oct 25, 2022



Recent mean field interpretations of learning dynamics in over-parameterized neural networks offer theoretical insights on the empirical success of first order optimization algorithms in finding global minima of the nonconvex risk landscape. In this paper, we explore applying mean field learning dynamics as a computational algorithm, rather than as an analytical tool. Specifically, we design a Sinkhorn regularized proximal algorithm to approximate the distributional flow from the learning dynamics in the mean field regime over weighted point clouds. In this setting, a contractive fixed point recursion computes the time-varying weights, numerically realizing the interacting Wasserstein gradient flow of the parameter distribution supported over the neuronal ensemble. An appealing aspect of the proposed algorithm is that the measure-valued recursions allow meshless computation. We demonstrate the proposed computational framework of interacting weighted particle evolution on binary and multi-class classification. Our algorithm performs gradient descent of the free energy associated with the risk functional.
A Physics-informed Deep Learning Approach for Minimum Effort Stochastic Control of Colloidal Self-Assembly
Aug 19, 2022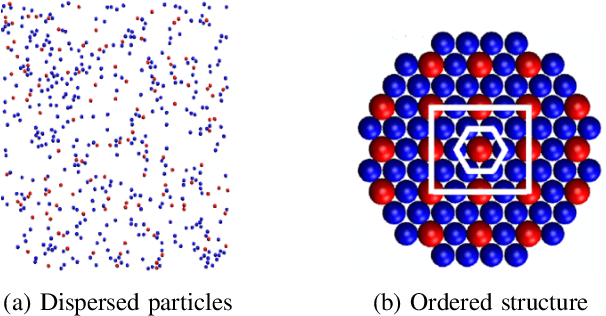

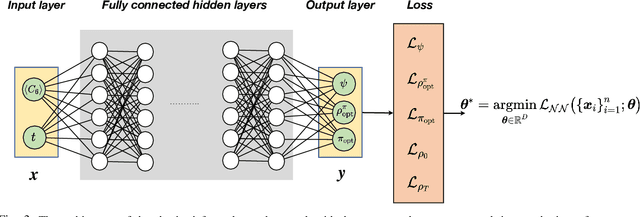

We propose formulating the finite-horizon stochastic optimal control problem for colloidal self-assembly in the space of probability density functions (PDFs) of the underlying state variables (namely, order parameters). The control objective is formulated in terms of steering the state PDFs from a prescribed initial probability measure towards a prescribed terminal probability measure with minimum control effort. For specificity, we use a univariate stochastic state model from the literature. Both the analysis and the computational steps for control synthesis as developed in this paper generalize for multivariate stochastic state dynamics given by generic nonlinear in state and non-affine in control models. We derive the conditions of optimality for the associated optimal control problem. This derivation yields a system of three coupled partial differential equations together with the boundary conditions at the initial and terminal times. The resulting system is a generalized instance of the so-called Schr\"{o}dinger bridge problem. We then determine the optimal control policy by training a physics-informed deep neural network, where the "physics" are the derived conditions of optimality. The performance of the proposed solution is demonstrated via numerical simulations on a benchmark colloidal self-assembly problem.
A Distributed Algorithm for Measure-valued Optimization with Additive Objective
Feb 17, 2022We propose a distributed nonparametric algorithm for solving measure-valued optimization problems with additive objectives. Such problems arise in several contexts in stochastic learning and control including Langevin sampling from an unnormalized prior, mean field neural network learning and Wasserstein gradient flows. The proposed algorithm comprises a two-layer alternating direction method of multipliers (ADMM). The outer-layer ADMM generalizes the Euclidean consensus ADMM to the Wasserstein consensus ADMM, and to its entropy-regularized version Sinkhorn consensus ADMM. The inner-layer ADMM turns out to be a specific instance of the standard Euclidean ADMM. The overall algorithm realizes operator splitting for gradient flows in the manifold of probability measures.