 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Type Activity Recognition in Robot-Centric Scenarios
Apr 12, 2016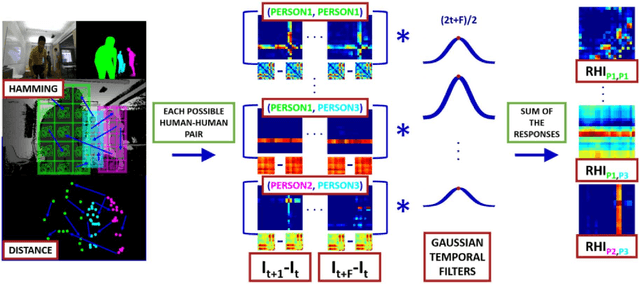
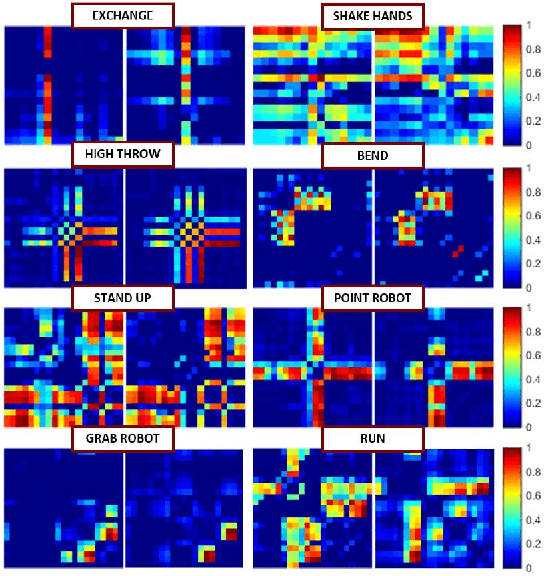

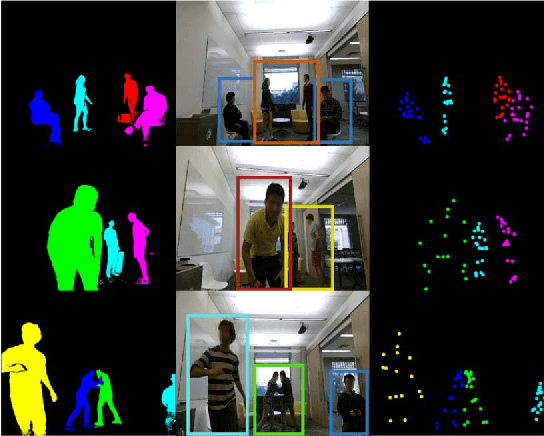
Activity recognition is very useful in scenarios where robots interact with, monitor or assist humans. In the past years many types of activities -- single actions, two persons interactions or ego-centric activities, to name a few -- have been analyzed. Whereas traditional methods treat such types of activities separately, an autonomous robot should be able to detect and recognize multiple types of activities to effectively fulfill its tasks. We propose a method that is intrinsically able to detect and recognize activities of different types that happen in sequence or concurrently. We present a new unified descriptor, called Relation History Image (RHI), which can be extracted from all the activity types we are interested in. We then formulate an optimization procedure to detect and recognize activities of different types. We apply our approach to a new dataset recorded from a robot-centric perspective and systematically evaluate its quality compared to multiple baselines. Finally, we show the efficacy of the RHI descriptor on publicly available datasets performing extensive comparisons.
Active Learning for Online Recognition of Human Activities from Streaming Videos
Apr 11, 2016



Recognising human activities from streaming videos poses unique challenges to learning algorithms: predictive models need to be scalable, incrementally trainable, and must remain bounded in size even when the data stream is arbitrarily long. Furthermore, as parameter tuning is problematic in a streaming setting, suitable approaches should be parameterless, and make no assumptions on what class labels may occur in the stream. We present here an approach to the recognition of human actions from streaming data which meets all these requirements by: (1) incrementally learning a model which adaptively covers the feature space with simple local classifiers; (2) employing an active learning strategy to reduce annotation requests; (3) achieving promising accuracy within a fixed model size. Extensive experiments on standard benchmarks show that our approach is competitive with state-of-the-art non-incremental methods, and outperforms the existing active incremental baselines.