 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscovering and Explaining Driver Behaviour under HoS Regulations
Jan 12, 2023World wide transport authorities are imposing complex Hours of Service regulations to drivers, which constraint the amount of working, driving and resting time when delivering a service. As a consequence, transport companies are responsible not only of scheduling driving plans aligned with laws that define the legal behaviour of a driver, but also of monitoring and identifying as soon as possible problematic patterns that can incur in costs due to sanctions. Transport experts are frequently in charge of many drivers and lack time to analyse the vast amount of data recorded by the onboard sensors, and companies have grown accustomed to pay sanctions rather than predict and forestall wrongdoings. This paper exposes an application for summarising raw driver activity logs according to these regulations and for explaining driver behaviour in a human readable format. The system employs planning, constraint, and clustering techniques to extract and describe what the driver has been doing while identifying infractions and the activities that originate them. Furthermore, it groups drivers based on similar driving patterns. An experimentation in real world data indicates that recurring driving patterns can be clustered from short basic driving sequences to whole drivers working days.
Planning from video game descriptions
Sep 07, 2021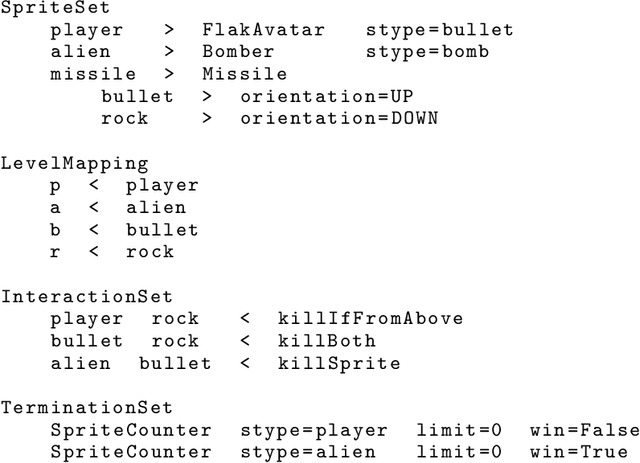
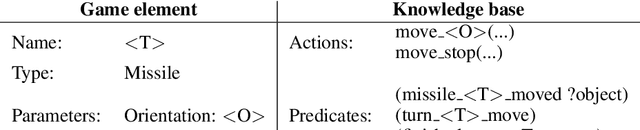
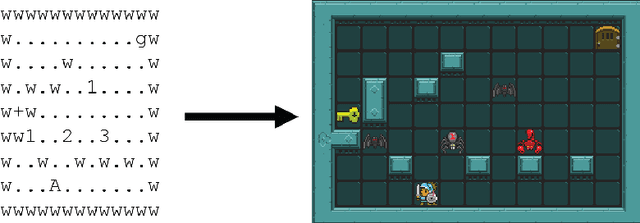
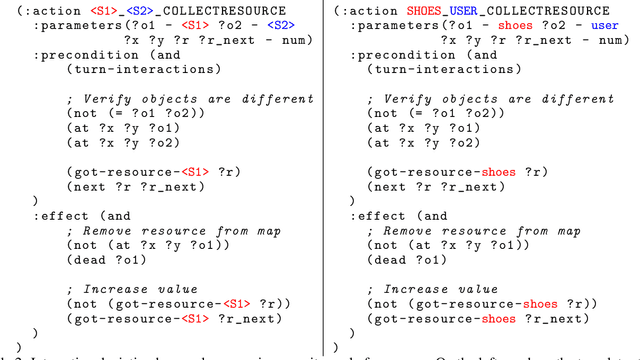
This project proposes a methodology for the automatic generation of action models from video game dynamics descriptions, as well as its integration with a planning agent for the execution and monitoring of the plans. Planners use these action models to get the deliberative behaviour for an agent in many different video games and, combined with a reactive module, solve deterministic and no-deterministic levels. Experimental results validate the methodology and prove that the effort put by a knowledge engineer can be greatly reduced in the definition of such complex domains. Furthermore, benchmarks of the domains has been produced that can be of interest to the international planning community to evaluate planners in international planning competitions.
Goal Reasoning by Selecting Subgoals with Deep Q-Learning
Dec 22, 2020
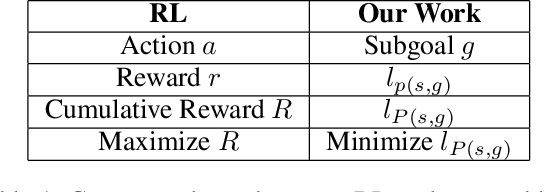
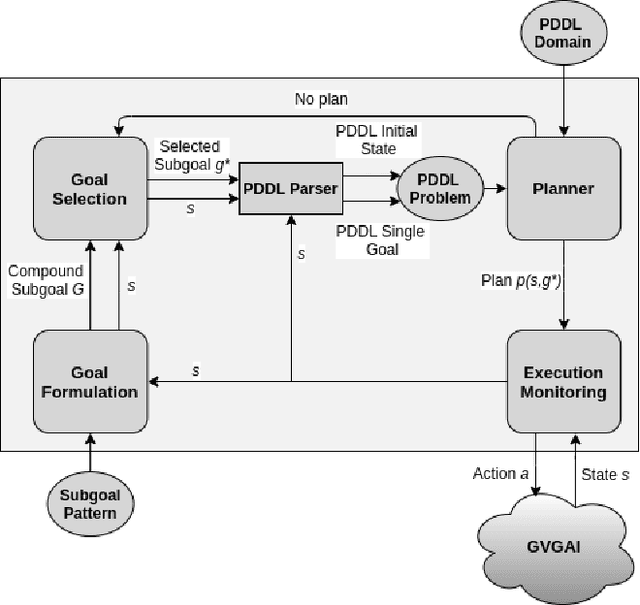
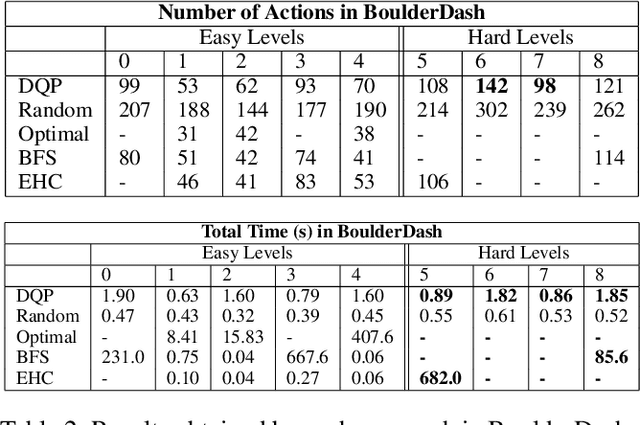
In this work we propose a goal reasoning method which learns to select subgoals with Deep Q-Learning in order to decrease the load of a planner when faced with scenarios with tight time restrictions, such as online execution systems. We have designed a CNN-based goal selection module and trained it on a standard video game environment, testing it on different games (planning domains) and levels (planning problems) to measure its generalization abilities. When comparing its performance with a satisfying planner, the results obtained show both approaches are able to find plans of good quality, but our method greatly decreases planning time. We conclude our approach can be successfully applied to different types of domains (games), and shows good generalization properties when evaluated on new levels (problems) of the same game (domain).