 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoal Reasoning by Selecting Subgoals with Deep Q-Learning
Paper and Code
Dec 22, 2020
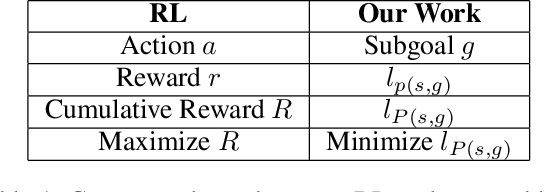
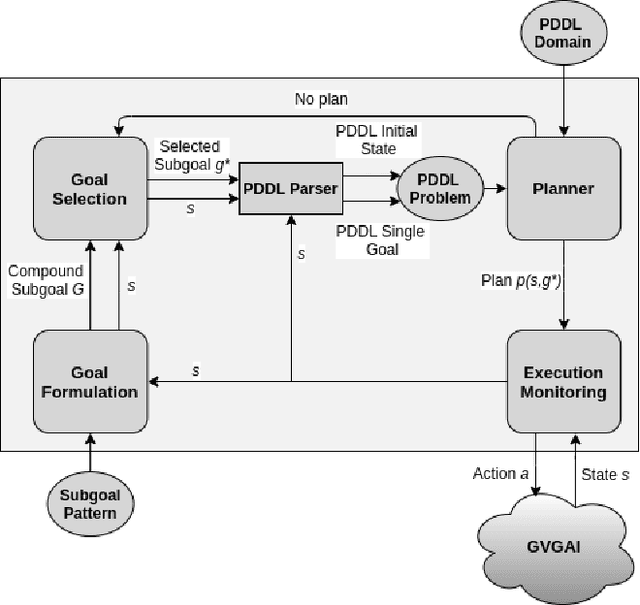
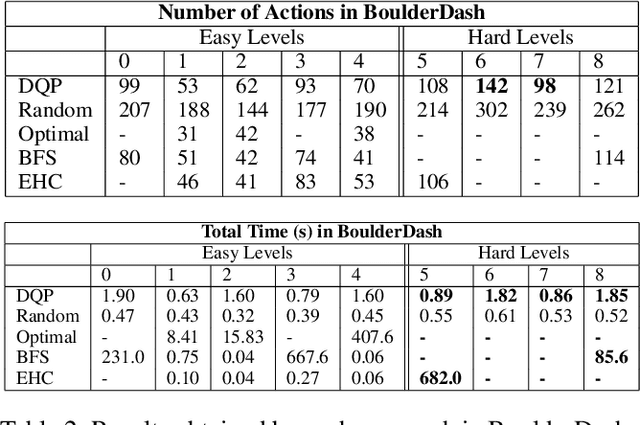
In this work we propose a goal reasoning method which learns to select subgoals with Deep Q-Learning in order to decrease the load of a planner when faced with scenarios with tight time restrictions, such as online execution systems. We have designed a CNN-based goal selection module and trained it on a standard video game environment, testing it on different games (planning domains) and levels (planning problems) to measure its generalization abilities. When comparing its performance with a satisfying planner, the results obtained show both approaches are able to find plans of good quality, but our method greatly decreases planning time. We conclude our approach can be successfully applied to different types of domains (games), and shows good generalization properties when evaluated on new levels (problems) of the same game (domain).