 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlaying Soccer without Colors in the SPL: A Convolutional Neural Network Approach
Nov 29, 2018
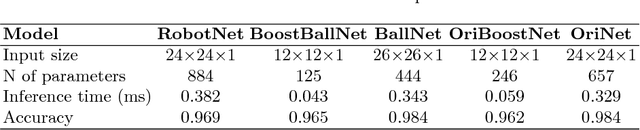


The goal of this paper is to propose a vision system for humanoid robotic soccer that does not use any color information. The main features of this system are: (i) real-time operation in the NAO robot, and (ii) the ability to detect the ball, the robots, their orientations, the lines and key field features robustly. Our ball detector, robot detector, and robot's orientation detector obtain the highest reported detection rates. The proposed vision system is tested in a SPL field with several NAO robots under realistic and highly demanding conditions. The obtained results are: robot detection rate of 94.90%, ball detection rate of 97.10%, and a completely perceived orientation rate of 99.88% when the observed robot is static, and 95.52% when the observed robot is moving.