 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Few-Shot Attention Recurrent Residual U-Net for Crack Segmentation
Mar 02, 2023Recent studies indicate that deep learning plays a crucial role in the automated visual inspection of road infrastructures. However, current learning schemes are static, implying no dynamic adaptation to users' feedback. To address this drawback, we present a few-shot learning paradigm for the automated segmentation of road cracks, which is based on a U-Net architecture with recurrent residual and attention modules (R2AU-Net). The retraining strategy dynamically fine-tunes the weights of the U-Net as a few new rectified samples are being fed into the classifier. Extensive experiments show that the proposed few-shot R2AU-Net framework outperforms other state-of-the-art networks in terms of Dice and IoU metrics, on a new dataset, named CrackMap, which is made publicly available at https://github.com/ikatsamenis/CrackMap.
TraCon: A novel dataset for real-time traffic cones detection using deep learning
May 24, 2022
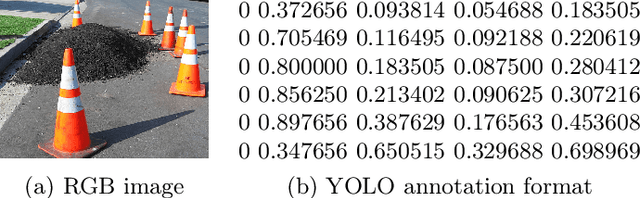

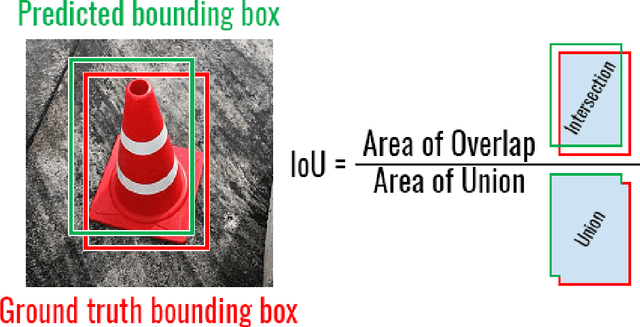
Substantial progress has been made in the field of object detection in road scenes. However, it is mainly focused on vehicles and pedestrians. To this end, we investigate traffic cone detection, an object category crucial for road effects and maintenance. In this work, the YOLOv5 algorithm is employed, in order to find a solution for the efficient and fast detection of traffic cones. The YOLOv5 can achieve a high detection accuracy with the score of IoU up to 91.31%. The proposed method is been applied to an RGB roadwork image dataset, collected from various sources.
Robotic Maintenance of Road Infrastructures: The HERON Project
May 09, 2022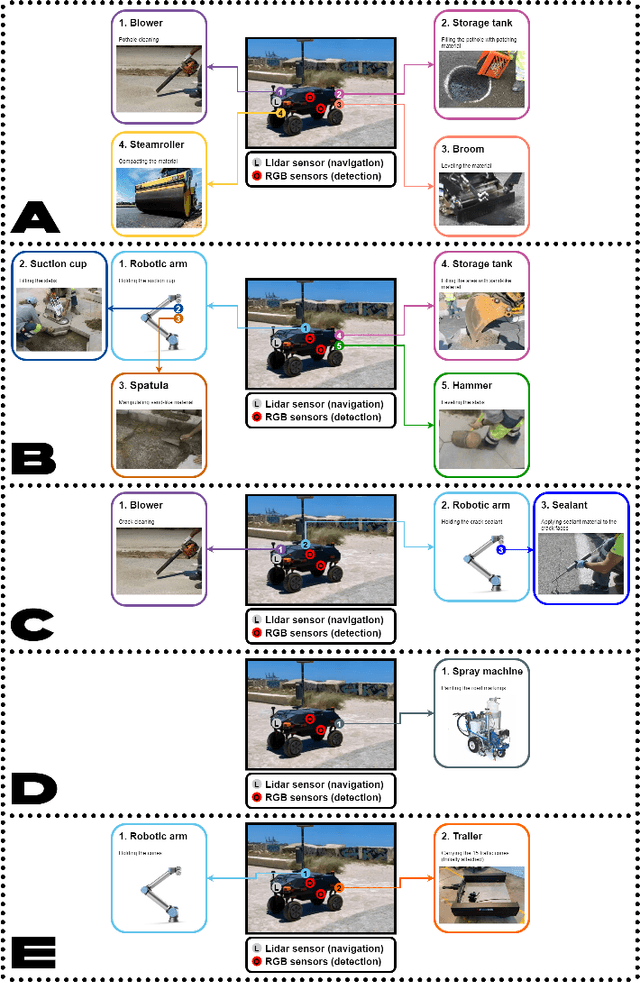
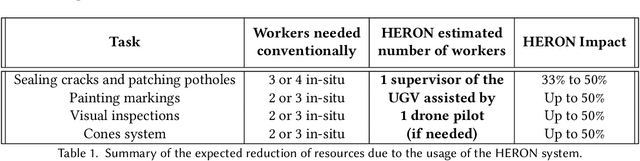
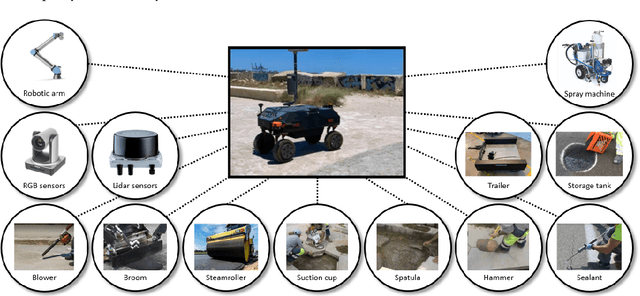
Of all public assets, road infrastructure tops the list. Roads are crucial for economic development and growth, providing access to education, health, and employment. The maintenance, repair, and upgrade of roads are therefore vital to road users' health and safety as well as to a well-functioning and prosperous modern economy. The EU-funded HERON project will develop an integrated automated system to adequately maintain road infrastructure. In turn, this will reduce accidents, lower maintenance costs, and increase road network capacity and efficiency. To coordinate maintenance works, the project will design an autonomous ground robotic vehicle that will be supported by autonomous drones. Sensors and scanners for 3D mapping will be used in addition to artificial intelligence toolkits to help coordinate road maintenance and upgrade workflows.
Pixel-level Corrosion Detection on Metal Constructions by Fusion of Deep Learning Semantic and Contour Segmentation
Aug 12, 2020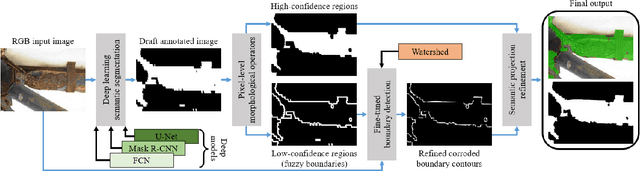
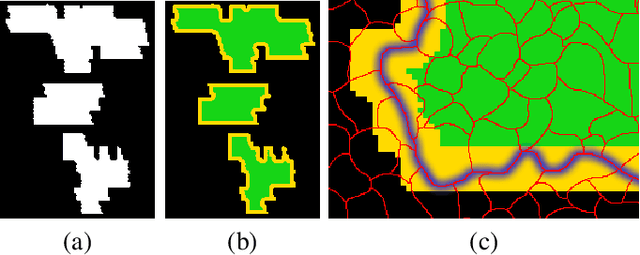
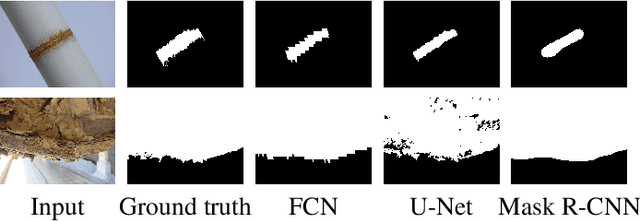
Corrosion detection on metal constructions is a major challenge in civil engineering for quick, safe and effective inspection. Existing image analysis approaches tend to place bounding boxes around the defected region which is not adequate both for structural analysis and pre-fabrication, an innovative construction concept which reduces maintenance cost, time and improves safety. In this paper, we apply three semantic segmentation-oriented deep learning models (FCN, U-Net and Mask R-CNN) for corrosion detection, which perform better in terms of accuracy and time and require a smaller number of annotated samples compared to other deep models, e.g. CNN. However, the final images derived are still not sufficiently accurate for structural analysis and pre-fabrication. Thus, we adopt a novel data projection scheme that fuses the results of color segmentation, yielding accurate but over-segmented contours of a region, with a processed area of the deep masks, resulting in high-confidence corroded pixels.