 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVOiLA: Vectorized Online Planning with Learned Diffusion Model for POMDP Agents
Jun 18, 2026Planning under uncertainty is an essential capability for autonomous robots. The Partially Observable Markov Decision Process (POMDP) provides a powerful framework for such a capability. Although POMDP-based planning has advanced significantly, its application to real-world problems is often limited by the difficulty of obtaining faithful POMDP models. We present Vectorized Online planning wIth Learned diffusion model for POMDP Agents (VOiLA), a framework that learns task-agnostic POMDP models for online planning under uncertainty. VOiLA learns transition and observation samplers using conditional diffusion models and learns observation-likelihood models for particle-based belief updates. To enable efficient online planning, the diffusion samplers are distilled into compact feedforward generators and integrated with Vectorized Online POMDP Planner (VOPP), an online POMDP planner designed to leverage GPU parallelization. Experimental results indicate the distillation strategy reduces sampling cost by up to nearly three orders of magnitude, making learned generative POMDP models practical for online planning. Evaluation of VOiLA on three benchmark problems indicate that VOiLA achieves equal or better performance than Recurrent Soft Actor Critic while using less than 10% training data, and generalizes much better to unseen environment configurations. Physical robot evaluation indicates VOiLA uses the models learned using only simulated data and generates a policy that successfully accomplish the task in 10 of 10 runs.
Constraining Streaming Flow Models for Adapting Learned Robot Trajectory Distributions
Feb 17, 2026Robot motion distributions often exhibit multi-modality and require flexible generative models for accurate representation. Streaming Flow Policies (SFPs) have recently emerged as a powerful paradigm for generating robot trajectories by integrating learned velocity fields directly in action space, enabling smooth and reactive control. However, existing formulations lack mechanisms for adapting trajectories post-training to enforce safety and task-specific constraints. We propose Constraint-Aware Streaming Flow (CASF), a framework that augments streaming flow policies with constraint-dependent metrics that reshape the learned velocity field during execution. CASF models each constraint, defined in either the robot's workspace or configuration space, as a differentiable distance function that is converted into a local metric and pulled back into the robot's control space. Far from restricted regions, the resulting metric reduces to the identity; near constraint boundaries, it smoothly attenuates or redirects motion, effectively deforming the underlying flow to maintain safety. This allows trajectories to be adapted in real time, ensuring that robot actions respect joint limits, avoid collisions, and remain within feasible workspaces, while preserving the multi-modal and reactive properties of streaming flow policies. We demonstrate CASF in simulated and real-world manipulation tasks, showing that it produces constraint-satisfying trajectories that remain smooth, feasible, and dynamically consistent, outperforming standard post-hoc projection baselines.
LipKernel: Lipschitz-Bounded Convolutional Neural Networks via Dissipative Layers
Oct 29, 2024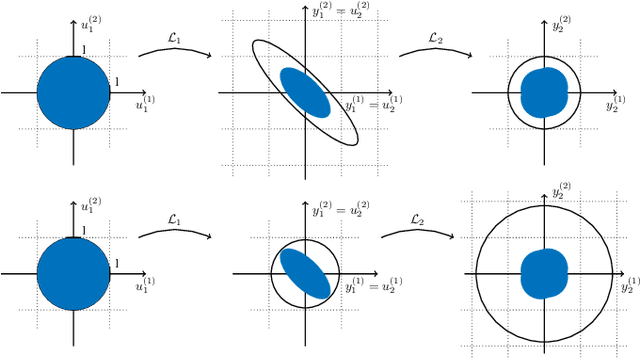
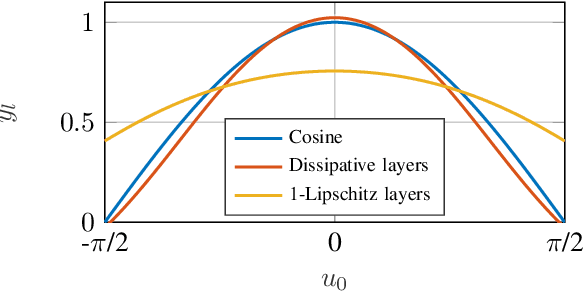
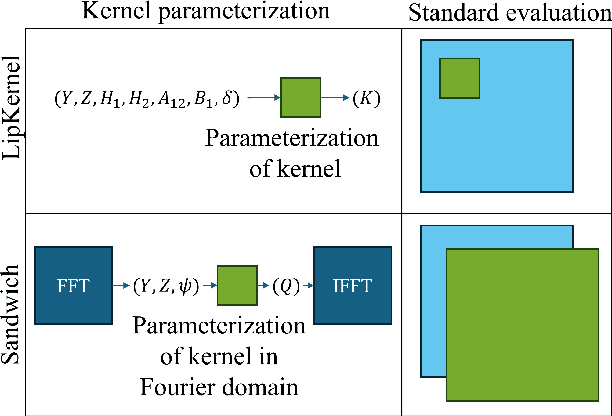
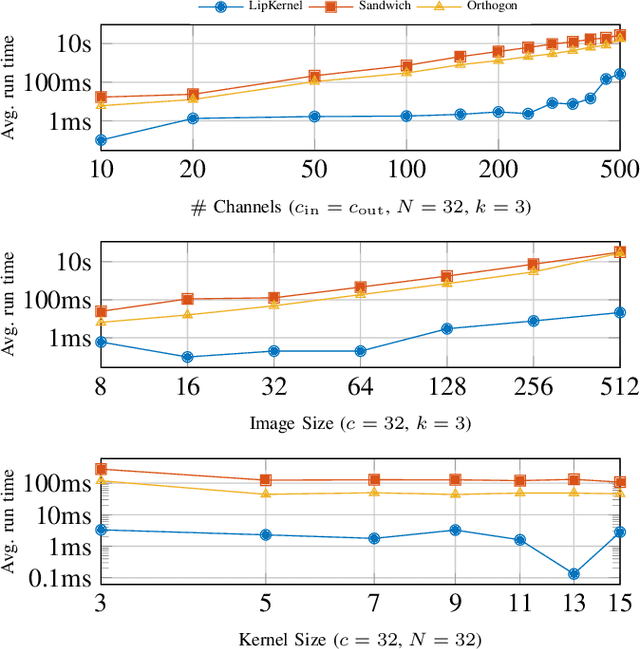
We propose a novel layer-wise parameterization for convolutional neural networks (CNNs) that includes built-in robustness guarantees by enforcing a prescribed Lipschitz bound. Each layer in our parameterization is designed to satisfy a linear matrix inequality (LMI), which in turn implies dissipativity with respect to a specific supply rate. Collectively, these layer-wise LMIs ensure Lipschitz boundedness for the input-output mapping of the neural network, yielding a more expressive parameterization than through spectral bounds or orthogonal layers. Our new method LipKernel directly parameterizes dissipative convolution kernels using a 2-D Roesser-type state space model. This means that the convolutional layers are given in standard form after training and can be evaluated without computational overhead. In numerical experiments, we show that the run-time using our method is orders of magnitude faster than state-of-the-art Lipschitz-bounded networks that parameterize convolutions in the Fourier domain, making our approach particularly attractive for improving robustness of learning-based real-time perception or control in robotics, autonomous vehicles, or automation systems. We focus on CNNs, and in contrast to previous works, our approach accommodates a wide variety of layers typically used in CNNs, including 1-D and 2-D convolutional layers, maximum and average pooling layers, as well as strided and dilated convolutions and zero padding. However, our approach naturally extends beyond CNNs as we can incorporate any layer that is incrementally dissipative.