 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Continuous State POMDP Planning with Semantic Observations: A Variational Approach
Jul 22, 2018

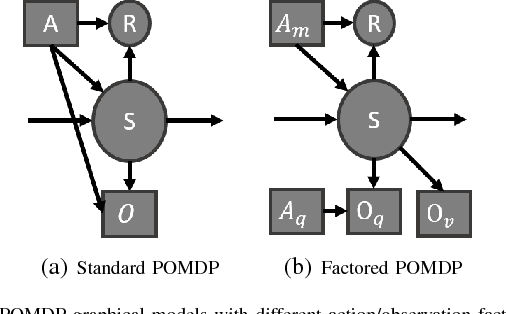
This work develops novel strategies for optimal planning with semantic observations using continuous state Partially Observable Markov Decision Processes (CPOMDPs). Two major innovations are presented in relation to Gaussian mixture (GM) CPOMDP policy approximation methods. While existing methods have many theoretically nice properties, they are hampered by the inability to efficiently represent and reason over hybrid continuous-discrete probabilistic models. The first major innovation is the derivation of closed-form variational Bayes GM approximations of Point-Based Value Iteration Bellman policy backups, using softmax models of continuous-discrete semantic observation probabilities. A key benefit of this approach is that dynamic decision-making tasks can be performed with complex non-Gaussian uncertainties, while also exploiting continuous dynamic state space models (thus avoiding cumbersome and costly discretization). The second major innovation is a new clustering-based technique for mixture condensation that scales well to very large GM policy functions and belief functions. Simulation results for a target search and interception task with semantic observations show that the GM policies resulting from these innovations are more effective than those produced by other state of the art GM and Monte Carlo based policy approximations, but require significantly less modeling overhead and runtime cost. Additional results demonstrate the robustness of this approach to model errors.
Closed-loop Bayesian Semantic Data Fusion for Collaborative Human-Autonomy Target Search
Jun 03, 2018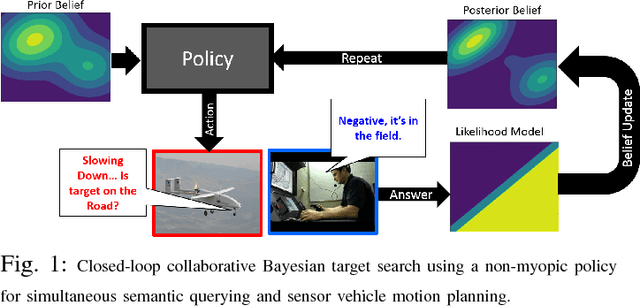
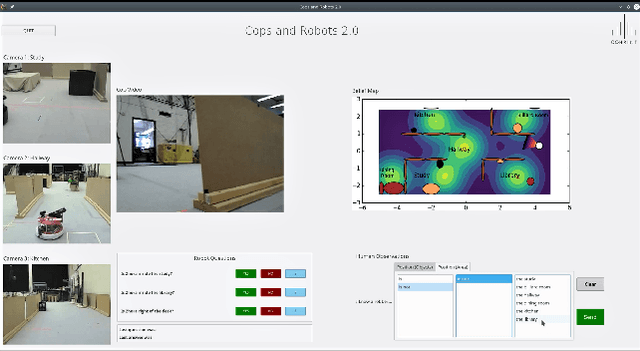
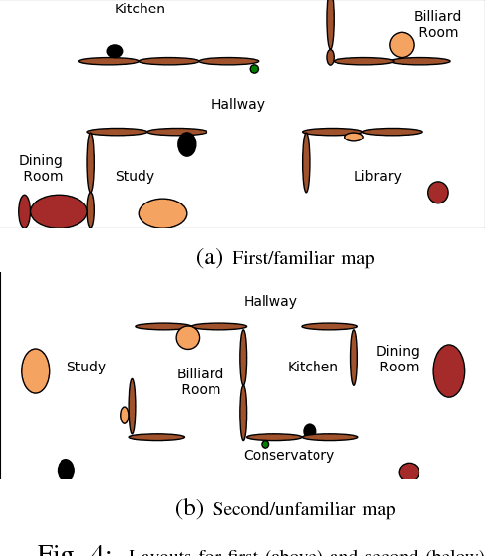
In search applications, autonomous unmanned vehicles must be able to efficiently reacquire and localize mobile targets that can remain out of view for long periods of time in large spaces. As such, all available information sources must be actively leveraged -- including imprecise but readily available semantic observations provided by humans. To achieve this, this work develops and validates a novel collaborative human-machine sensing solution for dynamic target search. Our approach uses continuous partially observable Markov decision process (CPOMDP) planning to generate vehicle trajectories that optimally exploit imperfect detection data from onboard sensors, as well as semantic natural language observations that can be specifically requested from human sensors. The key innovation is a scalable hierarchical Gaussian mixture model formulation for efficiently solving CPOMDPs with semantic observations in continuous dynamic state spaces. The approach is demonstrated and validated with a real human-robot team engaged in dynamic indoor target search and capture scenarios on a custom testbed.