 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Natural Brain-Machine Interaction using Endogenous Potentials based on Deep Neural Networks
Jun 25, 2021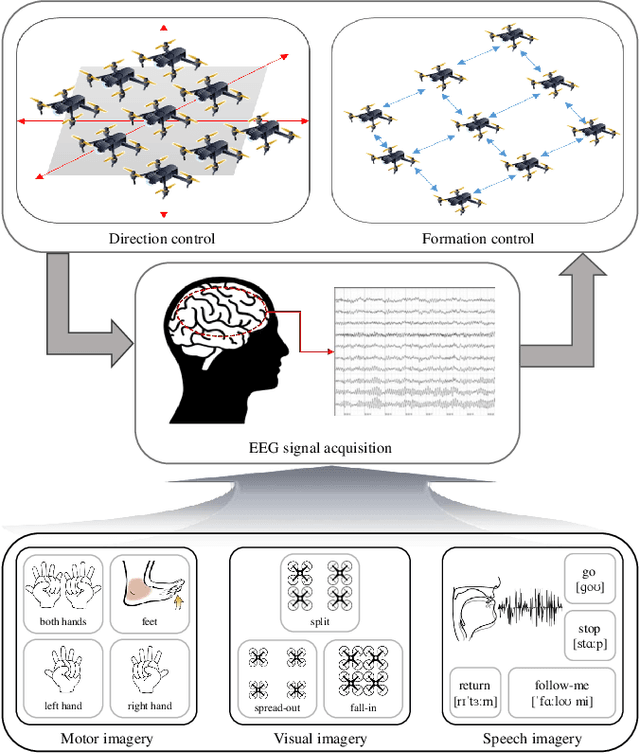
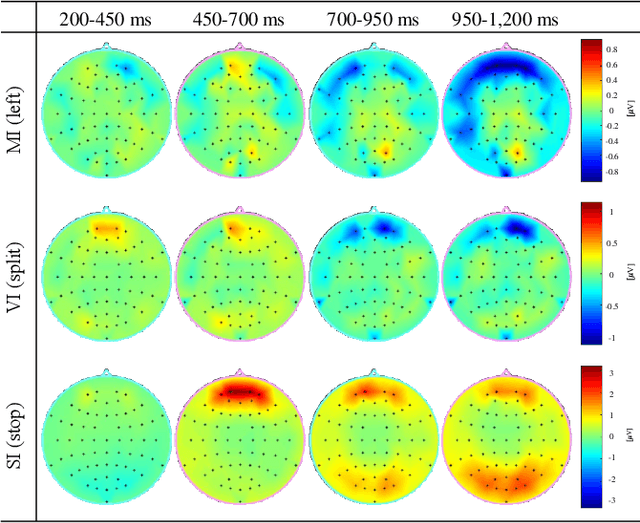
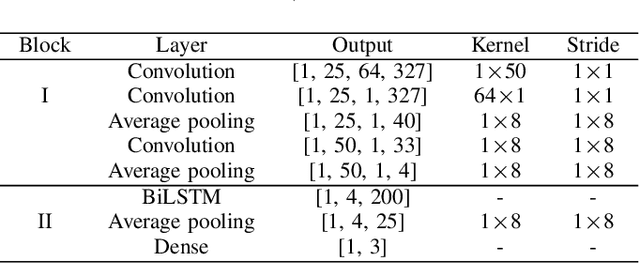
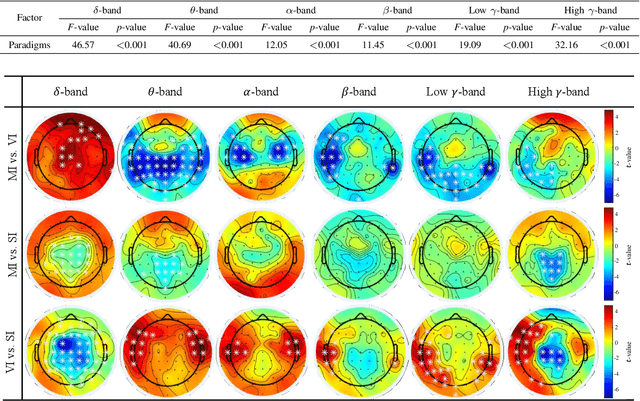
Human-robot collaboration has the potential to maximize the efficiency of the operation of autonomous robots. Brain-machine interface (BMI) would be a desirable technology to collaborate with robots since the intention or state of users can be translated from the neural activities. However, the electroencephalogram (EEG), which is one of the most popularly used non-invasive BMI modalities, has low accuracy and a limited degree of freedom (DoF) due to a low signal-to-noise ratio. Thus, improving the performance of multi-class EEG classification is crucial to develop more flexible BMI-based human-robot collaboration. In this study, we investigated the possibility for inter-paradigm classification of multiple endogenous BMI paradigms, such as motor imagery (MI), visual imagery (VI), and speech imagery (SI), to enhance the limited DoF while maintaining robust accuracy. We conducted the statistical and neurophysiological analyses on MI, VI, and SI and classified three paradigms using the proposed temporal information-based neural network (TINN). We confirmed that statistically significant features could be extracted on different brain regions when classifying three endogenous paradigms. Moreover, our proposed TINN showed the highest accuracy of 0.93 compared to the previous methods for classifying three different types of mental imagery tasks (MI, VI, and SI).
Towards Brain-Computer Interfaces for Drone Swarm Control
Feb 03, 2020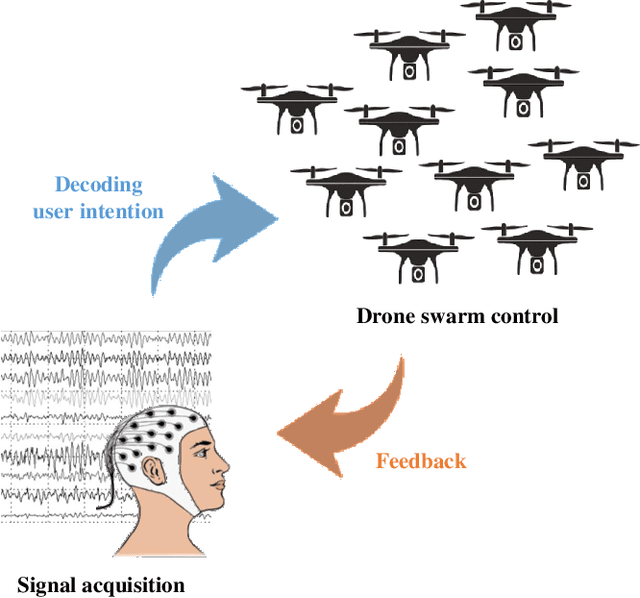
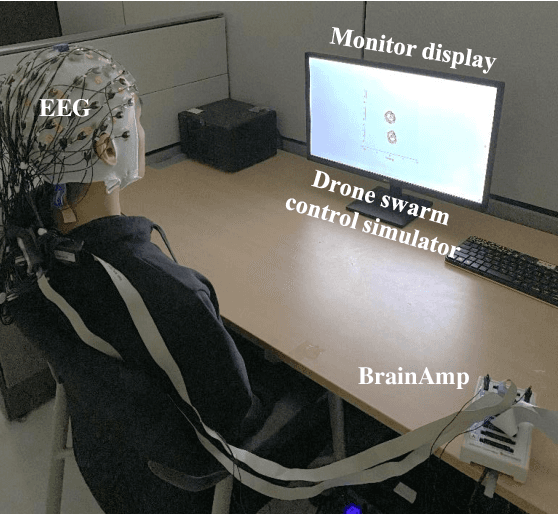
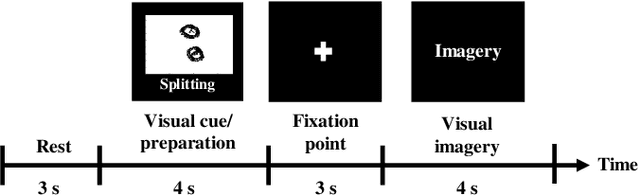
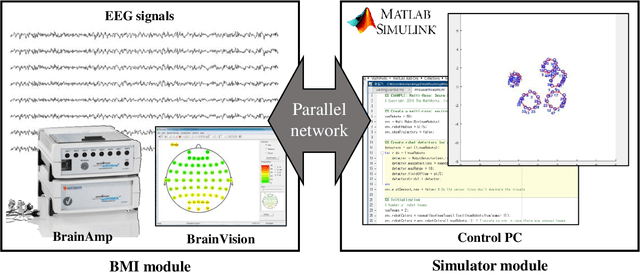
Noninvasive brain-computer interface (BCI) decodes brain signals to understand user intention. Recent advances have been developed for the BCI-based drone control system as the demand for drone control increases. Especially, drone swarm control based on brain signals could provide various industries such as military service or industry disaster. This paper presents a prototype of a brain swarm interface system for a variety of scenarios using a visual imagery paradigm. We designed the experimental environment that could acquire brain signals under a drone swarm control simulator environment. Through the system, we collected the electroencephalogram (EEG) signals with respect to four different scenarios. Seven subjects participated in our experiment and evaluated classification performances using the basic machine learning algorithm. The grand average classification accuracy is higher than the chance level accuracy. Hence, we could confirm the feasibility of the drone swarm control system based on EEG signals for performing high-level tasks.