 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCyclops: Open Platform for Scale Truck Platooning
Mar 03, 2022
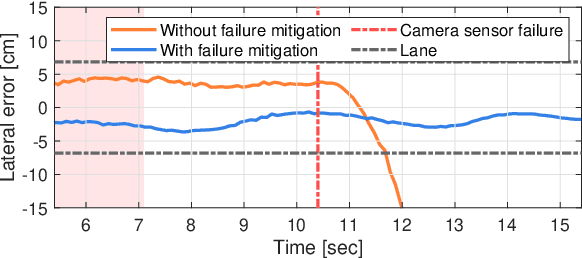
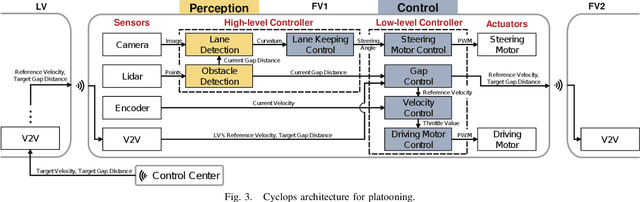
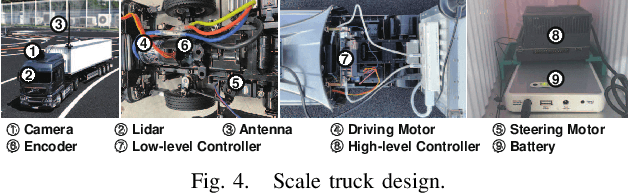
Cyclops, introduced in this paper, is an open research platform for everyone that wants to validate novel ideas and approaches in the area of self-driving heavy-duty vehicle platooning. The platform consists of multiple 1/14 scale semi-trailer trucks, a scale proving ground, and associated computing, communication and control modules that enable self-driving on the proving ground. A perception system for each vehicle is composed of a lidar-based object tracking system and a lane detection/control system. The former is to maintain the gap to the leading vehicle and the latter is to maintain the vehicle within the lane by steering control. The lane detection system is optimized for truck platooning where the field of view of the front-facing camera is severely limited due to a small gap to the leading vehicle. This platform is particularly amenable to validate mitigation strategies for safety-critical situations. Indeed, a simplex structure is adopted in the embedded module for testing various fail safe operations. We illustrate a scenario where camera sensor fails in the perception system but the vehicle operates at a reduced capacity to a graceful stop. Details of the Cyclops including 3D CAD designs and algorithm source codes are released for those who want to build similar testbeds.