 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoLCZ: Towards Automatized Local Climate Zone Mapping from Rule-Based Remote Sensing
May 22, 2024



Local climate zones (LCZs) established a standard classification system to categorize the landscape universe for improved urban climate studies. Existing LCZ mapping is guided by human interaction with geographic information systems (GIS) or modelled from remote sensing (RS) data. GIS-based methods do not scale to large areas. However, RS-based methods leverage machine learning techniques to automatize LCZ classification from RS. Yet, RS-based methods require huge amounts of manual labels for training. We propose a novel LCZ mapping framework, termed AutoLCZ, to extract the LCZ classification features from high-resolution RS modalities. We study the definition of numerical rules designed to mimic the LCZ definitions. Those rules model geometric and surface cover properties from LiDAR data. Correspondingly, we enable LCZ classification from RS data in a GIS-based scheme. The proposed AutoLCZ method has potential to reduce the human labor to acquire accurate metadata. At the same time, AutoLCZ sheds light on the physical interpretability of RS-based methods. In a proof-of-concept for New York City (NYC) we leverage airborne LiDAR surveys to model 4 LCZ features to distinguish 10 LCZ types. The results indicate the potential of AutoLCZ as promising avenue for large-scale LCZ mapping from RS data.
Assessment of Local Climate Zone Products via Simplified Classification Rule with 3D Building Maps
Sep 27, 2023This study assesses the performance of a global Local Climate Zone (LCZ) product. We examined the built-type classes of LCZs in three major metropolitan areas within the U.S. A reference LCZ was constructed using a simple rule-based method based on high-resolution 3D building maps. Our evaluation demonstrated that the global LCZ product struggles to differentiate classes that demand precise building footprint information (Classes 6 and 9), and classes that necessitate the identification of subtle differences in building elevation (Classes 4-6). Additionally, we identified inconsistent tendencies, where the distribution of classes skews differently across different cities, suggesting the presence of a data distribution shift problem in the machine learning-based LCZ classifier. Our findings shed light on the uncertainties in global LCZ maps, help identify the LCZ classes that are the most challenging to distinguish, and offer insight into future plans for LCZ development and validation.
A Fully Automated and Scalable Surface Water Mapping with Topographic Airborne LiDAR Data
Jan 16, 2023Reliable and accurate high-resolution maps of surface waters are critical inputs to models that help understand the impacts and relationships between the environment and human activities. Advances in remote sensing technology have opened up the possibility of mapping very small bodies of water that are closely related to people's daily lives and are mostly affected by anthropogenic pressures. However, a robust and scalable method that works well for all types of water bodies located in diverse landscapes at high-resolution has yet to be developed. This paper presents a method that can accurately extract surface water bodies up to a very fine scale in a wide variety of landscapes. Unlike optical image-based methods, the proposed method exploits the robust assumption that surface water is flat as gravity always pulls liquid molecules down. Based on this natural law, the proposed method extracts accurate, high-resolution water bodies including their elevations in a fully automated manner using only airborne LiDAR data. Extensive experiments with large ($\approx$ 2,500$km^{2}$) and diverse landscapes (urban, coastal, and mountainous areas) confirmed that our method can generate accurate results without site-specific parameter tunings for varied types of surface water. The proposed method enables an automated, scalable high-resolution mapping of a full 3D topography that includes both water and terrain, using only point clouds for the first time. We will release the code to the public in the hope that our work would lead to more effective solutions to help build a sustainable and resilient environment.
A new explainable DTM generation algorithm with airborne LIDAR data: grounds are smoothly connected eventually
Aug 24, 2022
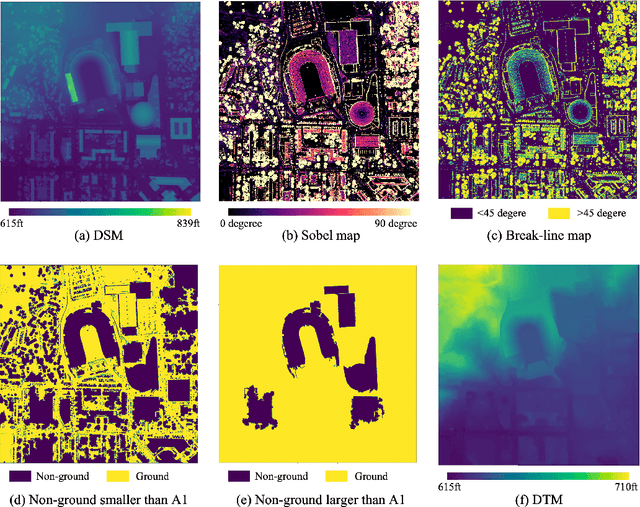

The digital terrain model (DTM) is fundamental geospatial data for various studies in urban, environmental, and Earth science. The reliability of the results obtained from such studies can be considerably affected by the errors and uncertainties of the underlying DTM. Numerous algorithms have been developed to mitigate the errors and uncertainties of DTM. However, most algorithms involve tricky parameter selection and complicated procedures that make the algorithm's decision rule obscure, so it is often difficult to explain and predict the errors and uncertainties of the resulting DTM. Also, previous algorithms often consider the local neighborhood of each point for distinguishing non-ground objects, which limits both search radius and contextual understanding and can be susceptible to errors particularly if point density varies. This study presents an open-source DTM generation algorithm for airborne LiDAR data that can consider beyond the local neighborhood and whose results are easily explainable, predictable, and reliable. The key assumption of the algorithm is that grounds are smoothly connected while non-grounds are surrounded by areas having sharp elevation changes. The robustness and uniqueness of the proposed algorithm were evaluated in geographically complex environments through tiling evaluation compared to other state-of-the-art algorithms.
Towards an unsupervised large-scale 2D and 3D building mapping with LiDAR
May 29, 2022



A 2D and 3D building map provides invaluable information for understanding human activities and their impacts on Earth and its environment. Despite enormous efforts to improve the quality of building maps, current large-scale building maps have lots of errors and are limited to providing only 2D building information. This study presents a state-of-the-art 2D and 3D building extraction algorithm with airborne LiDAR data that is suitable for large-scale building mapping. Our algorithm operates in a fully unsupervised manner and does not require either any training label or training procedure. Our algorithm requires only simple operations of morphological filtering and planarity-based filtering but can produce an accurate 2D and 3D building map. A quantitative and qualitative evaluation in a large-scale dataset (-550 sqkm) of Denver and New York City showed that our algorithm outperforms the deep learning-based Microsoft's building mapping algorithm even without any parameter tuning. More extensive evaluations in different conditions of landscapes confirmed that our algorithm is scalable and can be improved further with appropriate parameter selection. Our algorithm is more advantageous than other image-based building extraction algorithms in that it is more computationally efficient, more accurate, and more explainable. Our proposed algorithm that can produce an accurate large-scale 2D and 3D building map provides a great potential towards a global-scale 2D and 3D building mapping with airborne LiDAR data.