 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA new explainable DTM generation algorithm with airborne LIDAR data: grounds are smoothly connected eventually
Paper and Code
Aug 24, 2022
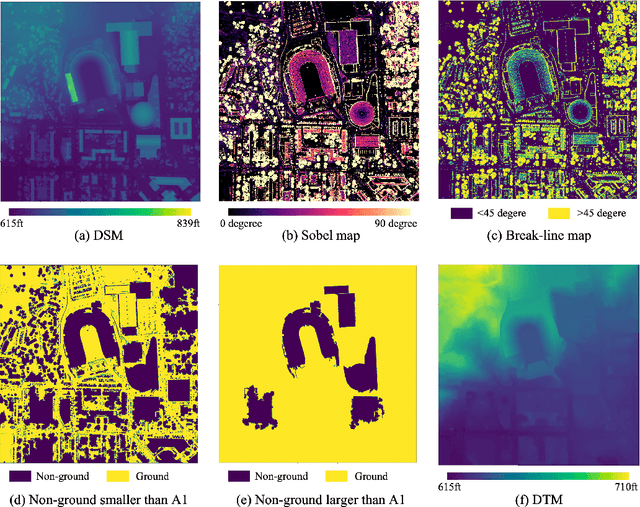

The digital terrain model (DTM) is fundamental geospatial data for various studies in urban, environmental, and Earth science. The reliability of the results obtained from such studies can be considerably affected by the errors and uncertainties of the underlying DTM. Numerous algorithms have been developed to mitigate the errors and uncertainties of DTM. However, most algorithms involve tricky parameter selection and complicated procedures that make the algorithm's decision rule obscure, so it is often difficult to explain and predict the errors and uncertainties of the resulting DTM. Also, previous algorithms often consider the local neighborhood of each point for distinguishing non-ground objects, which limits both search radius and contextual understanding and can be susceptible to errors particularly if point density varies. This study presents an open-source DTM generation algorithm for airborne LiDAR data that can consider beyond the local neighborhood and whose results are easily explainable, predictable, and reliable. The key assumption of the algorithm is that grounds are smoothly connected while non-grounds are surrounded by areas having sharp elevation changes. The robustness and uniqueness of the proposed algorithm were evaluated in geographically complex environments through tiling evaluation compared to other state-of-the-art algorithms.