 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAPT: Model-Predictive Out-of-Distribution Detection and Failure Diagnosis for Sim-to-Real Humanoid Robots
Feb 02, 2026Deploying learned control policies on humanoid robots is challenging: policies that appear robust in simulation can execute confidently in out-of-distribution (OOD) states after Sim-to-Real transfer, leading to silent failures that risk hardware damage. Although anomaly detection can mitigate these failures, prior methods are often incompatible with high-rate control, poorly calibrated at the extremely low false-positive rates required for practical deployment, or operate as black boxes that provide a binary stop signal without explaining why the robot drifted from nominal behavior. We present RAPT, a lightweight, self-supervised deployment-time monitor for 50Hz humanoid control. RAPT learns a probabilistic spatio-temporal manifold of nominal execution from simulation and evaluates execution-time predictive deviation as a calibrated, per-dimension signal. This yields (i) reliable online OOD detection under strict false-positive constraints and (ii) a continuous, interpretable measure of Sim-to-Real mismatch that can be tracked over time to quantify how far deployment has drifted from training. Beyond detection, we introduce an automated post-hoc root-cause analysis pipeline that combines gradient-based temporal saliency derived from RAPT's reconstruction objective with LLM-based reasoning conditioned on saliency and joint kinematics to produce semantic failure diagnoses in a zero-shot setting. We evaluate RAPT on a Unitree G1 humanoid across four complex tasks in simulation and on physical hardware. In large-scale simulation, RAPT improves True Positive Rate (TPR) by 37% over the strongest baseline at a fixed episode-level false positive rate of 0.5%. On real-world deployments, RAPT achieves a 12.5% TPR improvement and provides actionable interpretability, reaching 75% root-cause classification accuracy across 16 real-world failures using only proprioceptive data.
Scalable Multi-Objective Robot Reinforcement Learning through Gradient Conflict Resolution
Sep 18, 2025Reinforcement Learning (RL) robot controllers usually aggregate many task objectives into one scalar reward. While large-scale proximal policy optimisation (PPO) has enabled impressive results such as robust robot locomotion in the real world, many tasks still require careful reward tuning and are brittle to local optima. Tuning cost and sub-optimality grow with the number of objectives, limiting scalability. Modelling reward vectors and their trade-offs can address these issues; however, multi-objective methods remain underused in RL for robotics because of computational cost and optimisation difficulty. In this work, we investigate the conflict between gradient contributions for each objective that emerge from scalarising the task objectives. In particular, we explicitly address the conflict between task-based rewards and terms that regularise the policy towards realistic behaviour. We propose GCR-PPO, a modification to actor-critic optimisation that decomposes the actor update into objective-wise gradients using a multi-headed critic and resolves conflicts based on the objective priority. Our methodology, GCR-PPO, is evaluated on the well-known IsaacLab manipulation and locomotion benchmarks and additional multi-objective modifications on two related tasks. We show superior scalability compared to parallel PPO (p = 0.04), without significant computational overhead. We also show higher performance with more conflicting tasks. GCR-PPO improves on large-scale PPO with an average improvement of 9.5%, with high-conflict tasks observing a greater improvement. The code is available at https://github.com/humphreymunn/GCR-PPO.
Whole-Body Dynamic Throwing with Legged Manipulators
Oct 08, 2024



Most robotic behaviours focus on either manipulation or locomotion, where tasks that require the integration of both, such as full-body throwing, remain under-explored. Throwing with a robot involves complex coordination between object manipulation and legged locomotion, which is crucial for advanced real-world interactions. This work investigates the challenge of full-body throwing in robotic systems and highlights the advantages of utilising the robot's entire body. We propose a deep reinforcement learning (RL) approach that leverages the robot's body to enhance throwing performance through a strategically designed curriculum to avoid local optima and sparse but informative reward functions to improve policy flexibility. The robot's body learns to generate additional momentum and fine-tune the projectile release velocity. Our full-body method achieves on average 47% greater throwing distance and 34% greater throwing accuracy than the arm alone, across two robot morphologies - an armed quadruped and a humanoid. We also extend our method to optimise robot stability during throws. The learned policy effectively generalises throwing to targets at any 3D point in space within a specified range, which has not previously been achieved and does so with human-level throwing accuracy. We successfully transferred this approach from simulation to a real robot using sim2real techniques, demonstrating its practical viability.
Modularity in NEAT Reinforcement Learning Networks
May 13, 2022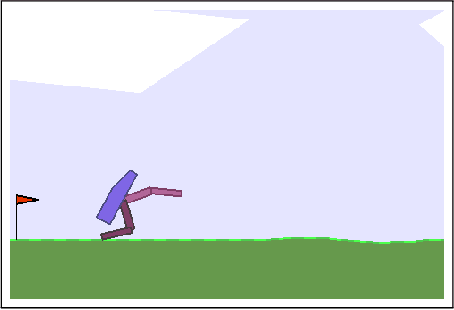
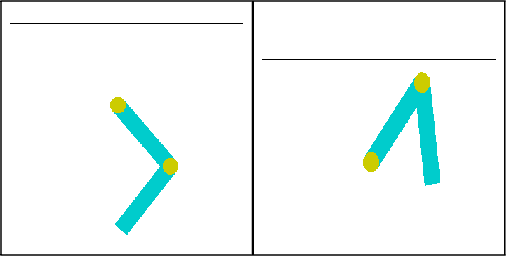
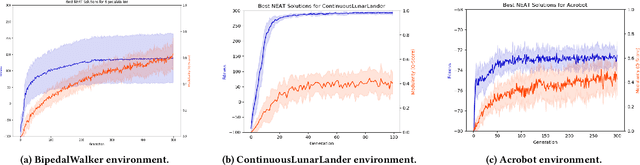
Modularity is essential to many well-performing structured systems, as it is a useful means of managing complexity [8]. An analysis of modularity in neural networks produced by machine learning algorithms can offer valuable insight into the workings of such algorithms and how modularity can be leveraged to improve performance. However, this property is often overlooked in the neuroevolutionary literature, so the modular nature of many learning algorithms is unknown. This property was assessed on the popular algorithm "NeuroEvolution of Augmenting Topologies" (NEAT) for standard simulation benchmark control problems due to NEAT's ability to optimise network topology. This paper shows that NEAT networks seem to rapidly increase in modularity over time with the rate and convergence dependent on the problem. Interestingly, NEAT tends towards increasingly modular networks even when network fitness converges. It was shown that the ideal level of network modularity in the explored parameter space is highly dependent on other network variables, dispelling theories that modularity has a straightforward relationship to network performance. This is further proven in this paper by demonstrating that rewarding modularity directly did not improve fitness.
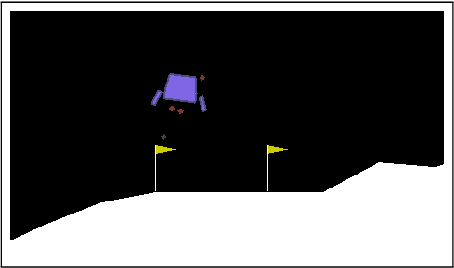
Assessing Evolutionary Terrain Generation Methods for Curriculum Reinforcement Learning
Mar 29, 2022
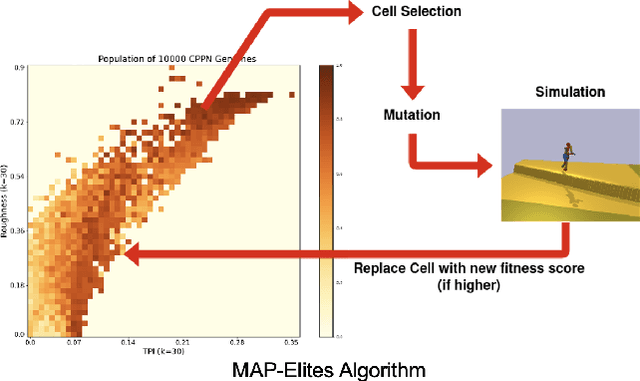
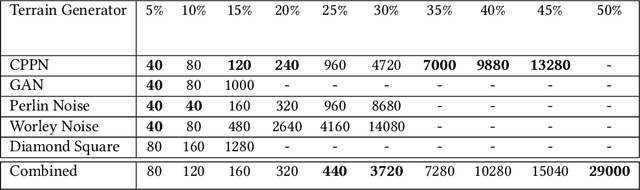
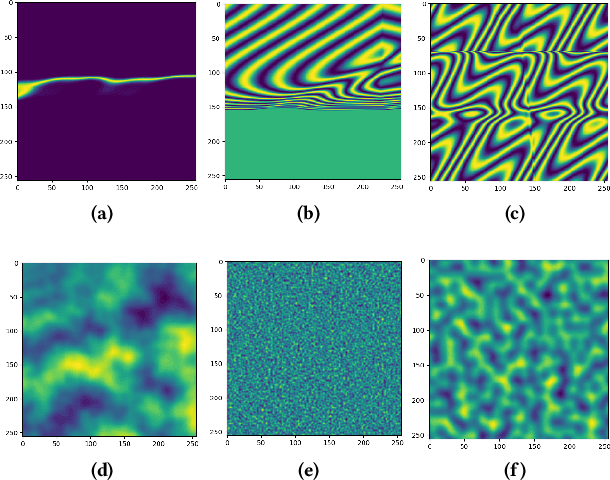
Curriculum learning allows complex tasks to be mastered via incremental progression over `stepping stone' goals towards a final desired behaviour. Typical implementations learn locomotion policies for challenging environments through gradual complexification of a terrain mesh generated through a parameterised noise function. To date, researchers have predominantly generated terrains from a limited range of noise functions, and the effect of the generator on the learning process is underrepresented in the literature. We compare popular noise-based terrain generators to two indirect encodings, CPPN and GAN. To allow direct comparison between both direct and indirect representations, we assess the impact of a range of representation-agnostic MAP-Elites feature descriptors that compute metrics directly from the generated terrain meshes. Next, performance and coverage are assessed when training a humanoid robot in a physics simulator using the PPO algorithm. Results describe key differences between the generators that inform their use in curriculum learning, and present a range of useful feature descriptors for uptake by the community.