 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNighttime Hazy Image Enhancement via Progressively and Mutually Reinforcing Night-Haze Priors
Jan 05, 2026Enhancing the visibility of nighttime hazy images is challenging due to the complex degradation distributions. Existing methods mainly address a single type of degradation (e.g., haze or low-light) at a time, ignoring the interplay of different degradation types and resulting in limited visibility improvement. We observe that the domain knowledge shared between low-light and haze priors can be reinforced mutually for better visibility. Based on this key insight, in this paper, we propose a novel framework that enhances visibility in nighttime hazy images by reinforcing the intrinsic consistency between haze and low-light priors mutually and progressively. In particular, our model utilizes image-, patch-, and pixel-level experts that operate across visual and frequency domains to recover global scene structure, regional patterns, and fine-grained details progressively. A frequency-aware router is further introduced to adaptively guide the contribution of each expert, ensuring robust image restoration. Extensive experiments demonstrate the superior performance of our model on nighttime dehazing benchmarks both quantitatively and qualitatively. Moreover, we showcase the generalizability of our model in daytime dehazing and low-light enhancement tasks.
API: Empowering Generalizable Real-World Image Dehazing via Adaptive Patch Importance Learning
Jan 05, 2026Real-world image dehazing is a fundamental yet challenging task in low-level vision. Existing learning-based methods often suffer from significant performance degradation when applied to complex real-world hazy scenes, primarily due to limited training data and the intrinsic complexity of haze density distributions.To address these challenges, we introduce a novel Adaptive Patch Importance-aware (API) framework for generalizable real-world image dehazing. Specifically, our framework consists of an Automatic Haze Generation (AHG) module and a Density-aware Haze Removal (DHR) module. AHG provides a hybrid data augmentation strategy by generating realistic and diverse hazy images as additional high-quality training data. DHR considers hazy regions with varying haze density distributions for generalizable real-world image dehazing in an adaptive patch importance-aware manner. To alleviate the ambiguity of the dehazed image details, we further introduce a new Multi-Negative Contrastive Dehazing (MNCD) loss, which fully utilizes information from multiple negative samples across both spatial and frequency domains. Extensive experiments demonstrate that our framework achieves state-of-the-art performance across multiple real-world benchmarks, delivering strong results in both quantitative metrics and qualitative visual quality, and exhibiting robust generalization across diverse haze distributions.
Base Placement Optimization for Coverage Mobile Manipulation Tasks
Apr 17, 2023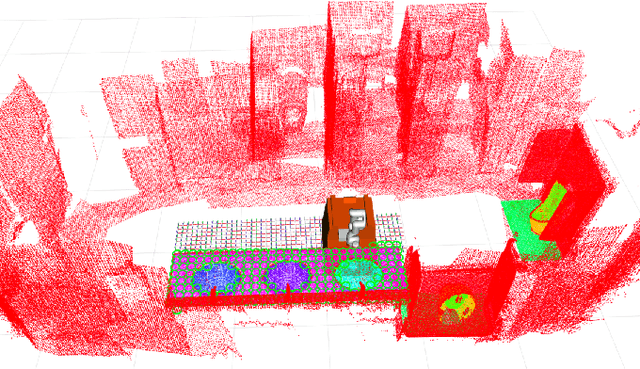
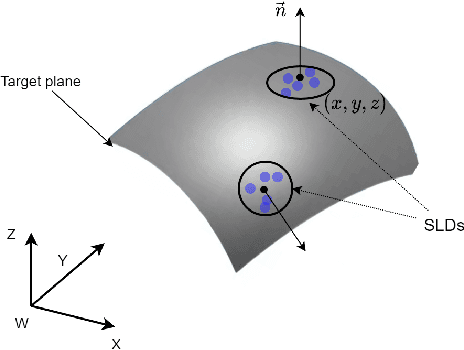
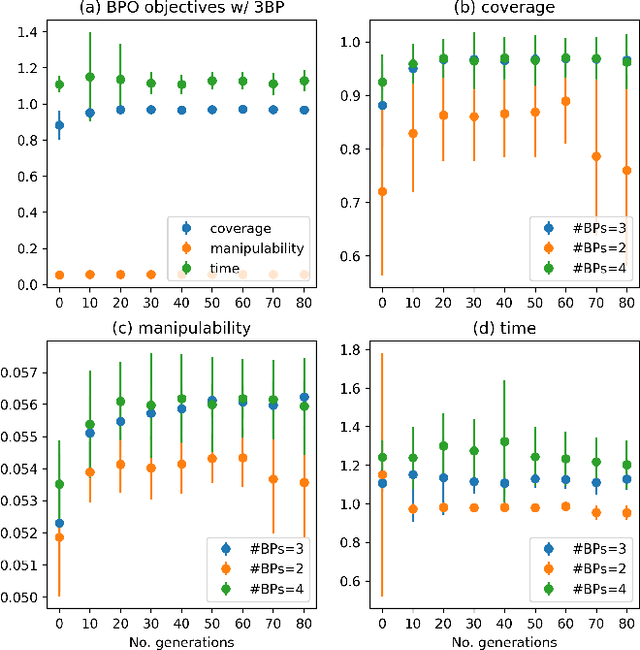
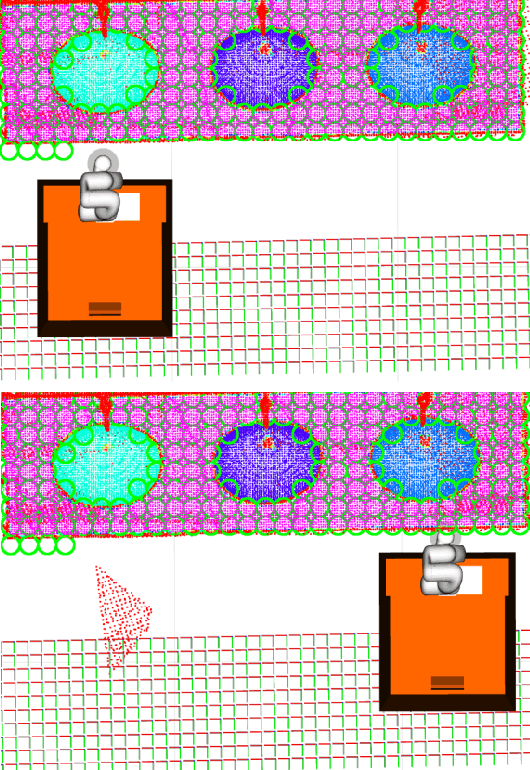
Base placement optimization (BPO) is a fundamental capability for mobile manipulation and has been researched for decades. However, it is still very challenging for some reasons. First, compared with humans, current robots are extremely inflexible, and therefore have higher requirements on the accuracy of base placements (BPs). Second, the BP and task constraints are coupled with each other. The optimal BP depends on the task constraints, and in BP will affect task constraints in turn. More tricky is that some task constraints are flexible and non-deterministic. Third, except for fulfilling tasks, some other performance metrics such as optimal energy consumption and minimal execution time need to be considered, which makes the BPO problem even more complicated. In this paper, a Scale-like disc (SLD) representation of the workspace is used to decouple task constraints and BPs. To evaluate reachability and return optimal working pose over SLDs, a reachability map (RM) is constructed offline. In order to optimize the objectives of coverage, manipulability, and time cost simultaneously, this paper formulates the BPO as a multi-objective optimization problem (MOOP). Among them, the time optimal objective is modeled as a traveling salesman problem (TSP), which is more in line with the actual situation. The evolutionary method is used to solve the MOOP. Besides, to ensure the validity and optimality of the solution, collision detection is performed on the candidate BPs, and solutions from BPO are further fine-tuned according to the specific given task. Finally, the proposed method is used to solve a real-world toilet coverage cleaning task. Experiments show that the optimized BPs can significantly improve the coverage and efficiency of the task.