 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVoLo: A Physical Orchestrator for Open-Vocabulary Long-Horizon Manipulation
Jun 05, 2026Open-vocabulary long-horizon manipulation requires robots to reason over flexible instructions and complex multi-object scenes while adaptively planning, executing, monitoring, and recovering from failures. We address these demands with a closed agent loop in which a VLM orchestrates heterogeneous robot capabilities as interruptible tools. Unlike in virtual AI agents, the timing of decisions, actions and tool calls is important in a physical world that does not pause for reasoning. We refer to this setting as Physical Orchestration, and propose VoLoAgent, a VLM that plans, monitors, and recovers by treating a VLA/WAM as an interruptible tool it steers mid-rollout alongside vision models and action primitives. To evaluate these long-horizon capabilities, we introduce RoboVoLo, a high-fidelity benchmark for open-vocabulary long-horizon manipulation across common sense, memory/state tracking, complex references, and world knowledge, with both task-level success and failure-mode diagnostics. Experiments show VoLoAgent substantially outperforms single VLA/VLM or tool-based systems, with validation on real-robot experiments. Project page: https://chicychen.github.io/VoLo/
Cosmos 3: Omnimodal World Models for Physical AI
Jun 01, 2026We introduce Cosmos 3, a family of omnimodal world models designed to jointly process and generate language, image, video, audio, and action sequences within a unified mixture-of-transformers architecture. By supporting highly flexible input-output configurations, Cosmos 3 seamlessly unifies critical modalities for Physical AI -- effectively subsuming vision-language models, video generators, world simulators, and world-action models into a single framework. Our evaluation demonstrates that Cosmos 3 establishes a new state-of-the-art across a diverse suite of understanding and generation tasks, demonstrating omnimodal world models as scalable, general-purpose backbones for embodied agents. Our post-trained Cosmos 3 models were ranked as the best open-source Text-to-Image and Image-to-Video models by Artificial Analysis, and the best policy model by RoboArena at the time the technical report was written. To accelerate open research and deployment in Physical AI, we make our code, model checkpoints, curated synthetic datasets, and evaluation benchmark available under the Linux Foundation's OpenMDW-1.1 https://openmdw.ai/license/1-1/ License at https://github.com/nvidia/cosmos}{github.com/nvidia/cosmos and https://huggingface.co/collections/nvidia/cosmos3 . The project website is available at https://research.nvidia.com/labs/cosmos-lab/cosmos3 .
RoboLab: A High-Fidelity Simulation Benchmark for Analysis of Task Generalist Policies
Apr 10, 2026The pursuit of general-purpose robotics has yielded impressive foundation models, yet simulation-based benchmarking remains a bottleneck due to rapid performance saturation and a lack of true generalization testing. Existing benchmarks often exhibit significant domain overlap between training and evaluation, trivializing success rates and obscuring insights into robustness. We introduce RoboLab, a simulation benchmarking framework designed to address these challenges. Concretely, our framework is designed to answer two questions: (1) to what extent can we understand the performance of a real-world policy by analyzing its behavior in simulation, and (2) which external factors most strongly affect that behavior under controlled perturbations. First, RoboLab enables human-authored and LLM-enabled generation of scenes and tasks in a robot- and policy-agnostic manner within a physically realistic and photorealistic simulation. With this, we propose the RoboLab-120 benchmark, consisting of 120 tasks categorized into three competency axes: visual, procedural, relational competency, across three difficulty levels. Second, we introduce a systematic analysis of real-world policies that quantify both their performance and the sensitivity of their behavior to controlled perturbations, indicating that high-fidelity simulation can serve as a proxy for analyzing performance and its dependence on external factors. Evaluation with RoboLab exposes significant performance gap in current state-of-the-art models. By providing granular metrics and a scalable toolset, RoboLab offers a scalable framework for evaluating the true generalization capabilities of task-generalist robotic policies.
SPARR: Simulation-based Policies with Asymmetric Real-world Residuals for Assembly
Feb 26, 2026Robotic assembly presents a long-standing challenge due to its requirement for precise, contact-rich manipulation. While simulation-based learning has enabled the development of robust assembly policies, their performance often degrades when deployed in real-world settings due to the sim-to-real gap. Conversely, real-world reinforcement learning (RL) methods avoid the sim-to-real gap, but rely heavily on human supervision and lack generalization ability to environmental changes. In this work, we propose a hybrid approach that combines a simulation-trained base policy with a real-world residual policy to efficiently adapt to real-world variations. The base policy, trained in simulation using low-level state observations and dense rewards, provides strong priors for initial behavior. The residual policy, learned in the real world using visual observations and sparse rewards, compensates for discrepancies in dynamics and sensor noise. Extensive real-world experiments demonstrate that our method, SPARR, achieves near-perfect success rates across diverse two-part assembly tasks. Compared to the state-of-the-art zero-shot sim-to-real methods, SPARR improves success rates by 38.4% while reducing cycle time by 29.7%. Moreover, SPARR requires no human expertise, in contrast to the state-of-the-art real-world RL approaches that depend heavily on human supervision.
Singularities of serial robots: Identification and distance computation using geometric algebra
Sep 26, 2021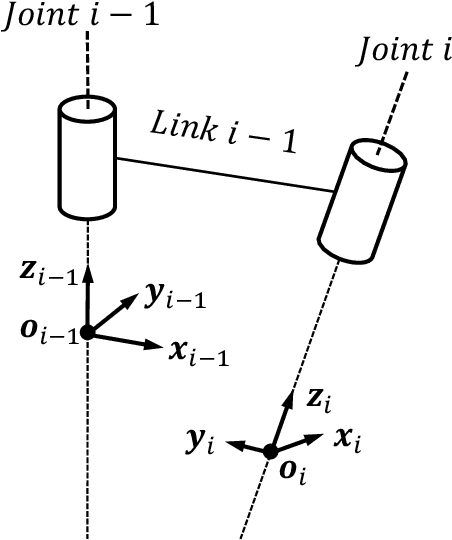
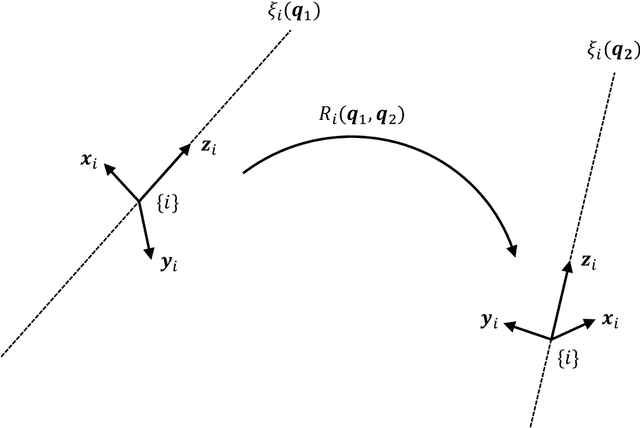
The singularities of serial robotic manipulators are those configurations in which the robot loses the ability to move in at least one direction. Hence, their identification is fundamental to enhance the performance of current control and motion planning strategies. While classical approaches entail the computation of the determinant of either a 6x n or nxn matrix for an n degrees of freedom serial robot, this work addresses a novel singularity identification method based on modelling the twists defined by the joint axes of the robot as vectors of the six-dimensional and three-dimensional geometric algebras. In particular, it consists of identifying which configurations cause the exterior product of these twists to vanish. In addition, since rotors represent rotations in geometric algebra, once these singularities have been identified, a distance function is defined in the configuration space C such that its restriction to the set of singular configurations S allows us to compute the distance of any configuration to a given singularity. This distance function is used to enhance how the singularities are handled in three different scenarios, namely motion planning, motion control and bilateral teleoperation.
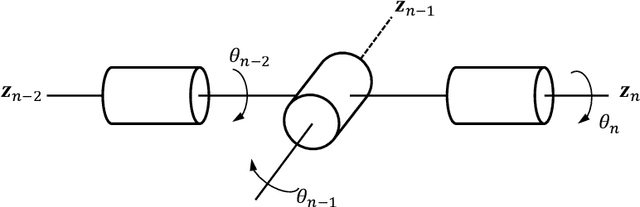
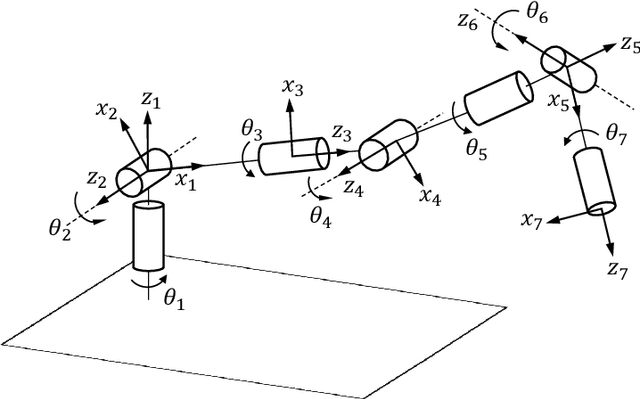
Closed-form solutions for the inverse kinematics of serial robots using conformal geometric algebra
Sep 25, 2021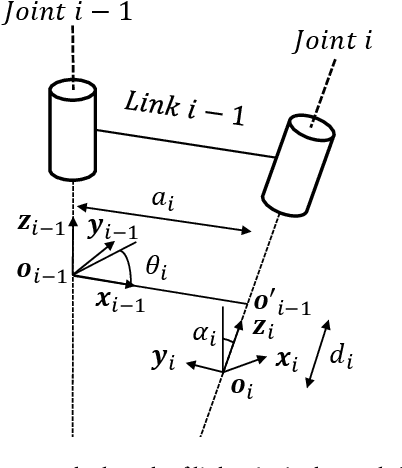
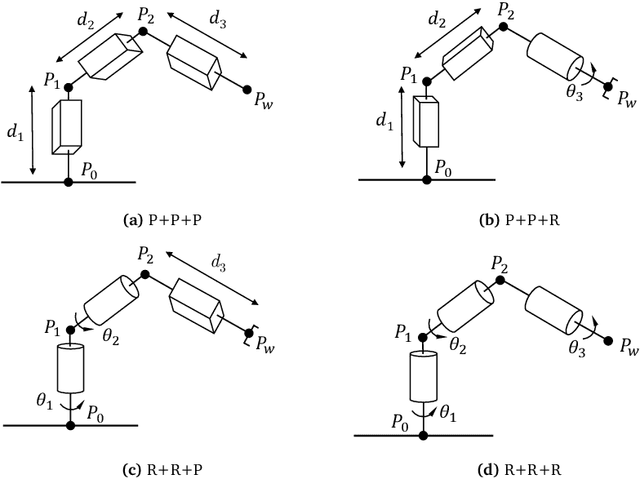
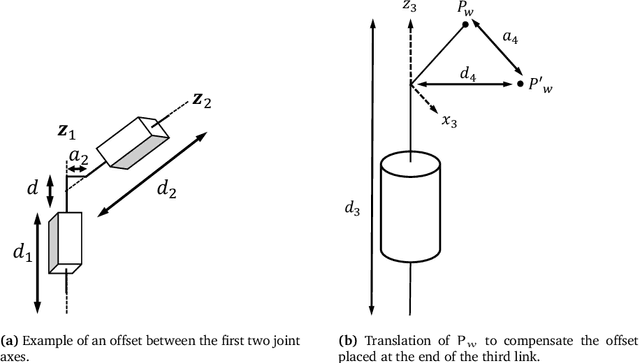
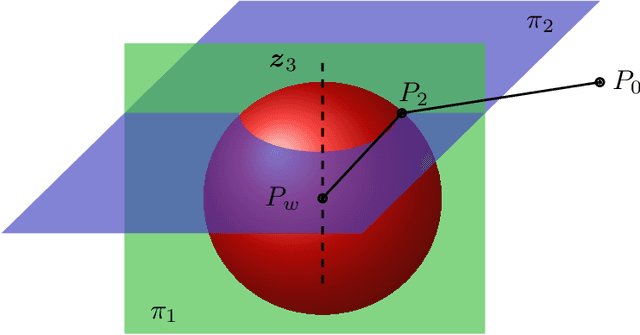
This work addresses the inverse kinematics of serial robots using conformal geometric algebra. Classical approaches include either the use of homogeneous matrices, which entails high computational cost and execution time or the development of particular geometric strategies that cannot be generalized to arbitrary serial robots. In this work, we present a compact, elegant and intuitive formulation of robot kinematics based on conformal geometric algebra that provides a suitable framework for the closed-form resolution of the inverse kinematic problem for manipulators with a spherical wrist. For serial robots of this kind, the inverse kinematics problem can be split in two subproblems: the position and orientation problems. The latter is solved by appropriately splitting the rotor that defines the target orientation into three simpler rotors, while the former is solved by developing a geometric strategy for each combination of prismatic and revolute joints that forms the position part of the robot. Finally, the inverse kinematics of 7 DoF redundant manipulators with a spherical wrist is solved by extending the geometric solutions obtained in the non-redundant case.