 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding Egocentric Procedural AI Assistant: Methods, Benchmarks, and Challenges
Nov 17, 2025Driven by recent advances in vision language models (VLMs) and egocentric perception research, we introduce the concept of an egocentric procedural AI assistant (EgoProceAssist) tailored to step-by-step support daily procedural tasks in a first-person view. In this work, we start by identifying three core tasks: egocentric procedural error detection, egocentric procedural learning, and egocentric procedural question answering. These tasks define the essential functions of EgoProceAssist within a new taxonomy. Specifically, our work encompasses a comprehensive review of current techniques, relevant datasets, and evaluation metrics across these three core areas. To clarify the gap between the proposed EgoProceAssist and existing VLM-based AI assistants, we introduce novel experiments and provide a comprehensive evaluation of representative VLM-based methods. Based on these findings and our technical analysis, we discuss the challenges ahead and suggest future research directions. Furthermore, an exhaustive list of this study is publicly available in an active repository that continuously collects the latest work: https://github.com/z1oong/Building-Egocentric-Procedural-AI-Assistant
OccProphet: Pushing Efficiency Frontier of Camera-Only 4D Occupancy Forecasting with Observer-Forecaster-Refiner Framework
Feb 21, 2025



Predicting variations in complex traffic environments is crucial for the safety of autonomous driving. Recent advancements in occupancy forecasting have enabled forecasting future 3D occupied status in driving environments by observing historical 2D images. However, high computational demands make occupancy forecasting less efficient during training and inference stages, hindering its feasibility for deployment on edge agents. In this paper, we propose a novel framework, i.e., OccProphet, to efficiently and effectively learn occupancy forecasting with significantly lower computational requirements while improving forecasting accuracy. OccProphet comprises three lightweight components: Observer, Forecaster, and Refiner. The Observer extracts spatio-temporal features from 3D multi-frame voxels using the proposed Efficient 4D Aggregation with Tripling-Attention Fusion, while the Forecaster and Refiner conditionally predict and refine future occupancy inferences. Experimental results on nuScenes, Lyft-Level5, and nuScenes-Occupancy datasets demonstrate that OccProphet is both training- and inference-friendly. OccProphet reduces 58\%$\sim$78\% of the computational cost with a 2.6$\times$ speedup compared with the state-of-the-art Cam4DOcc. Moreover, it achieves 4\%$\sim$18\% relatively higher forecasting accuracy. Code and models are publicly available at https://github.com/JLChen-C/OccProphet.
A Survey on Occupancy Perception for Autonomous Driving: The Information Fusion Perspective
May 08, 2024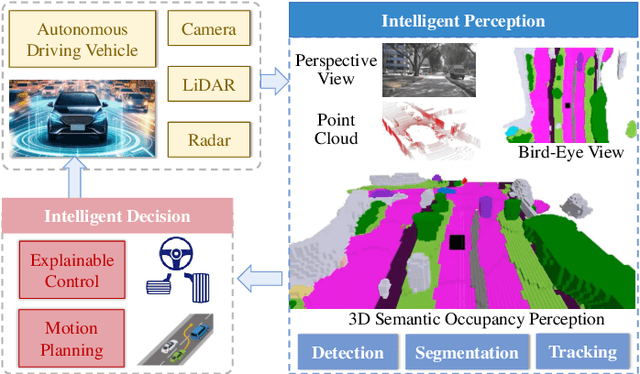



3D occupancy perception technology aims to observe and understand dense 3D environments for autonomous vehicles. Owing to its comprehensive perception capability, this technology is emerging as a trend in autonomous driving perception systems, and is attracting significant attention from both industry and academia. Similar to traditional bird's-eye view (BEV) perception, 3D occupancy perception has the nature of multi-source input and the necessity for information fusion. However, the difference is that it captures vertical structures that are ignored by 2D BEV. In this survey, we review the most recent works on 3D occupancy perception, and provide in-depth analyses of methodologies with various input modalities. Specifically, we summarize general network pipelines, highlight information fusion techniques, and discuss effective network training. We evaluate and analyze the occupancy perception performance of the state-of-the-art on the most popular datasets. Furthermore, challenges and future research directions are discussed. We hope this report will inspire the community and encourage more research work on 3D occupancy perception. A comprehensive list of studies in this survey is available in an active repository that continuously collects the latest work: https://github.com/HuaiyuanXu/3D-Occupancy-Perception.