 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariation of Camera Parameters due to Common Physical Changes in Focal Length and Camera Pose
Sep 02, 2024Accurate calibration of camera intrinsic parameters is crucial to various computer vision-based applications in the fields of intelligent systems, autonomous vehicles, etc. However, existing calibration schemes are incompetent for finding general trend of the variation of camera parameters due to common physical changes. In this paper, it is demonstrated that major and minor variations due to changes in focal length and camera pose, respectively, can be identified with a recently proposed calibration method. It is readily observable from the experimental results that the former variations have different trends (directions) of principal point deviation for different types of camera, possibly due to different internal lens configurations, while the latter have very similar trends in the deviation which is most likely due to direction of gravity. Finally, to confirm the validity of such unprecedented findings, 3D to 2D reprojection errors are compared for different methods of camera calibration.
Single-image driven 3d viewpoint training data augmentation for effective wine label recognition
Apr 12, 2024



Confronting the critical challenge of insufficient training data in the field of complex image recognition, this paper introduces a novel 3D viewpoint augmentation technique specifically tailored for wine label recognition. This method enhances deep learning model performance by generating visually realistic training samples from a single real-world wine label image, overcoming the challenges posed by the intricate combinations of text and logos. Classical Generative Adversarial Network (GAN) methods fall short in synthesizing such intricate content combination. Our proposed solution leverages time-tested computer vision and image processing strategies to expand our training dataset, thereby broadening the range of training samples for deep learning applications. This innovative approach to data augmentation circumvents the constraints of limited training resources. Using the augmented training images through batch-all triplet metric learning on a Vision Transformer (ViT) architecture, we can get the most discriminative embedding features for every wine label, enabling us to perform one-shot recognition of existing wine labels in the training classes or future newly collected wine labels unavailable in the training. Experimental results show a significant increase in recognition accuracy over conventional 2D data augmentation techniques.
Equivalence of Two Expressions of Principal Line
Jan 08, 2023


Geometry-based camera calibration using principal line is more precise and robust than calibration using optimization approaches; therefore, several researches try to re-derive the principal line from different views of 2D projective geometry to increase alternatives of the calibration process. In this report, algebraical equivalence of two expressions of principal line, one derived w.r.t homography and the other using for two sets of orthogonal vanishing points, is proved. Moreover, the extension of the second expression to incorporate infinite vanishing point is carried out with simple mathematics.
Visualizing and Alleviating the Effect of Radial Distortion on Camera Calibration Using Principal Lines
Jun 28, 2022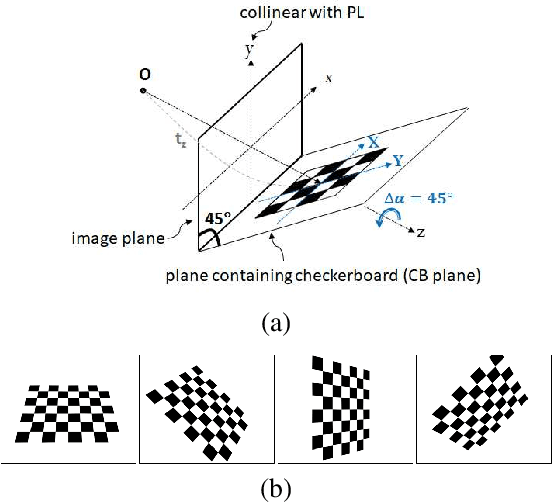


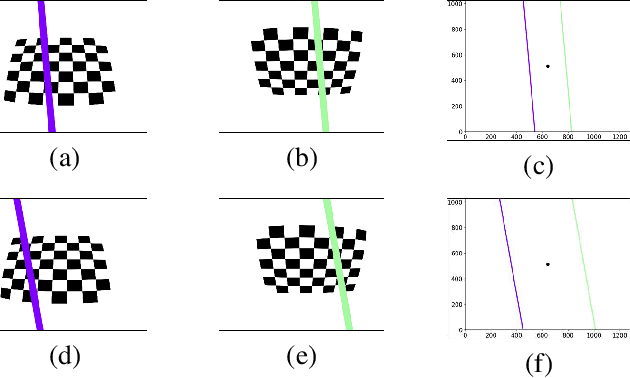
Preparing appropriate images for camera calibration is crucial to obtain accurate results. In this paper, new suggestions for preparing such data to alleviate the adverse effect of radial distortion for a calibration procedure using principal lines are developed through the investigations of: (i) identifying directions of checkerboard movements in an image which will result in maximum (and minimum) influence on the calibration results, and (ii) inspecting symmetry and monotonicity of such effect in (i) using the above principal lines. Accordingly, it is suggested that the estimation of principal point should based on linearly independent pairs of nearly parallel principal lines, with a member in each pair corresponds to a near 180-degree rotation (in the image plane) of the other. Experimental results show that more robust and consistent calibration results for the foregoing estimation can actually be obtained, compared with the renowned algebraic methods which estimate distortion parameters explicitly.
Descriptor Ensemble: An Unsupervised Approach to Descriptor Fusion in the Homography Space
Dec 13, 2014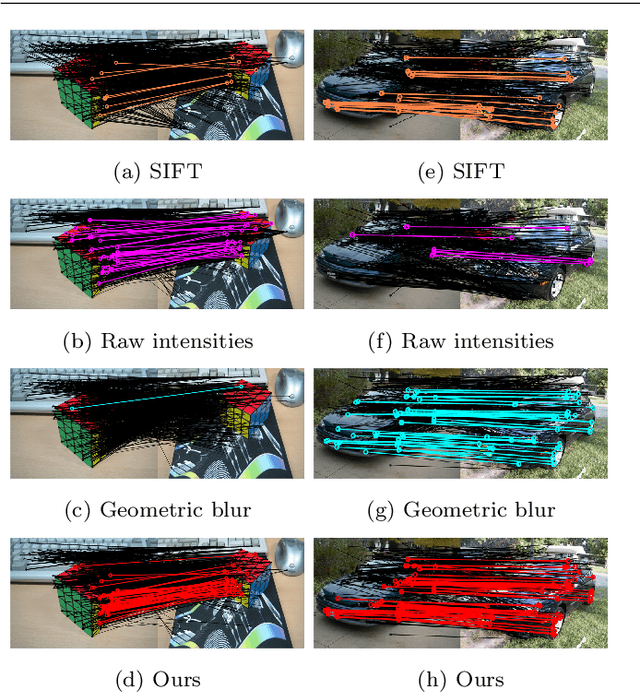
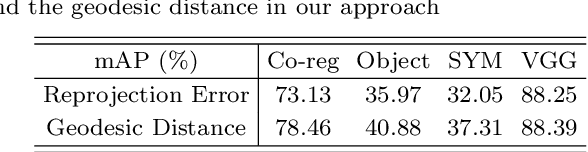
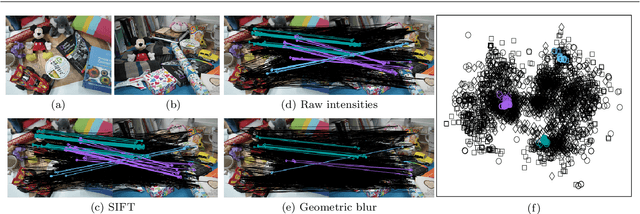
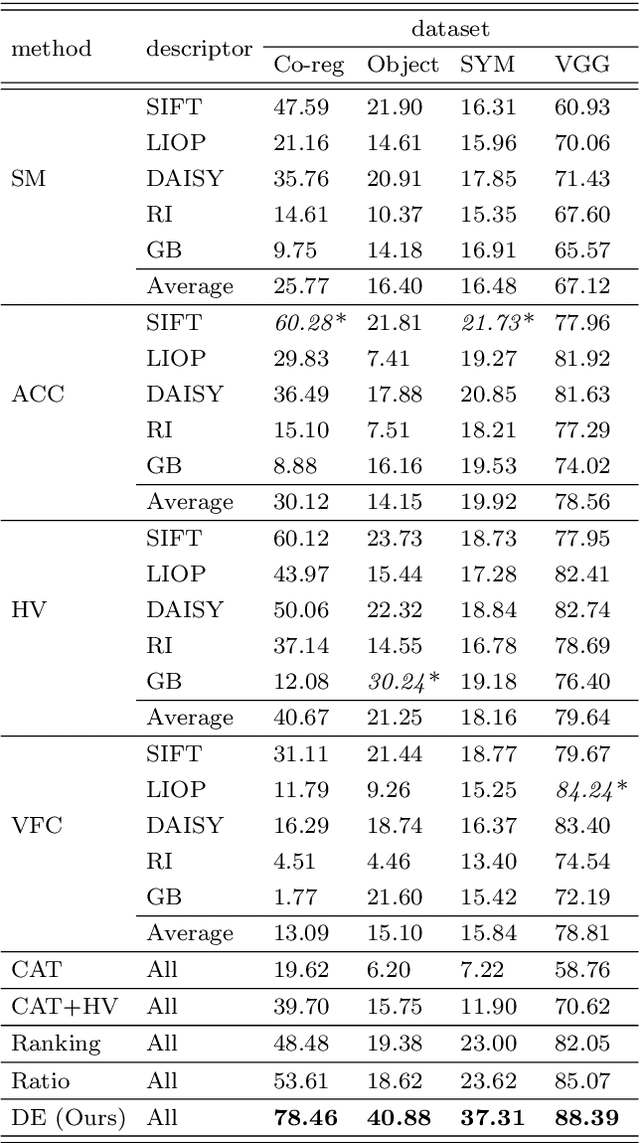
With the aim to improve the performance of feature matching, we present an unsupervised approach to fuse various local descriptors in the space of homographies. Inspired by the observation that the homographies of correct feature correspondences vary smoothly along the spatial domain, our approach stands on the unsupervised nature of feature matching, and can select a good descriptor for matching each feature point. Specifically, the homography space serves as the common domain, in which a correspondence obtained by any descriptor is considered as a point, for integrating various heterogeneous descriptors. Both geometric coherence and spatial continuity among correspondences are considered via computing their geodesic distances in the space. In this way, mutual verification across different descriptors is allowed, and correct correspondences will be highlighted with a high degree of consistency (i.e., short geodesic distances here). It follows that one-class SVM can be applied to identifying these correct correspondences, and boosts the performance of feature matching. The proposed approach is comprehensively compared with the state-of-the-art approaches, and evaluated on four benchmarks of image matching. The promising results manifest its effectiveness.