 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenetic Algorithm for Designing a Convenient Facility Layout for a Circular Flow Path
Mar 22, 2013In this paper, we present a heuristic for designing facility layouts that are convenient for designing a unidirectional loop for material handling. We use genetic algorithm where the objective function and crossover and mutation operators have all been designed specifically for this purpose. Our design is made under flexible bay structure and comparisons are made with other layouts from the literature that were designed under flexible bay structure.
Use of PSO in Parameter Estimation of Robot Dynamics; Part One: No Need for Parameterization
Nov 06, 2012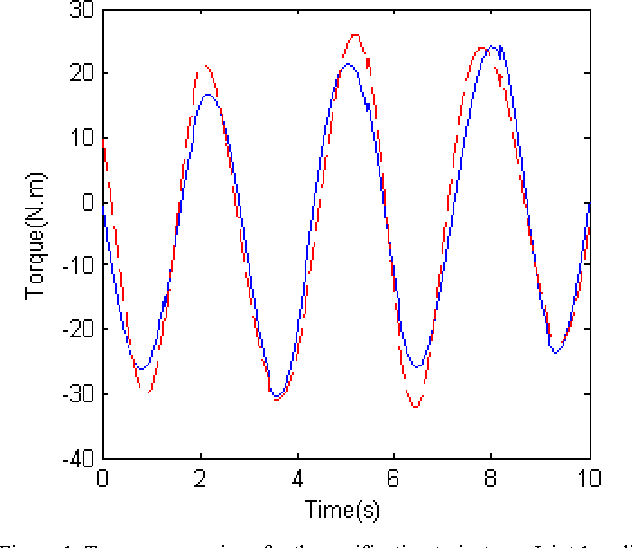
Offline procedures for estimating parameters of robot dynamics are practically based on the parameterized inverse dynamic model. In this paper, we present a novel approach to parameter estimation of robot dynamics which removes the necessity of parameterization (i.e. finding the minimum number of parameters from which the dynamics can be calculated through a linear model with respect to these parameters). This offline approach is based on a simple and powerful swarm intelligence tool: the particle swarm optimization (PSO). In this paper, we discuss and validate the method through simulated experiments. In Part Two we analyze our method in terms of robustness and compare it to robust analytical methods of estimation.
Ball Striking Algorithm for a 3 DOF Ping-Pong Playing Robot Based on Particle Swarm Optimization
Nov 06, 2012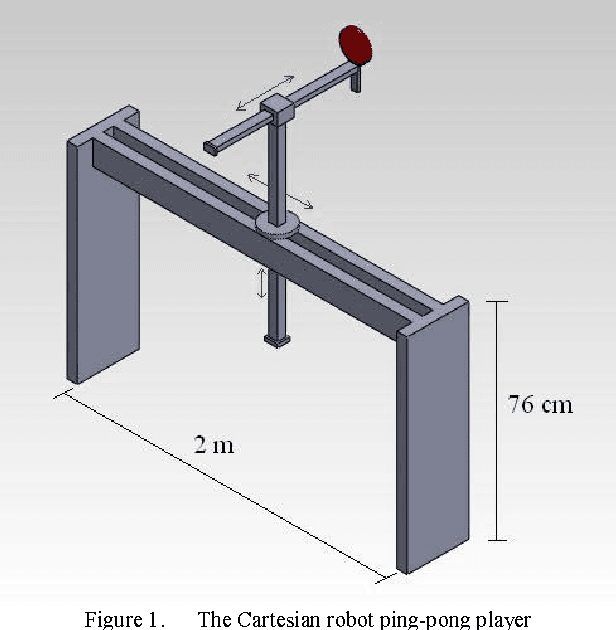
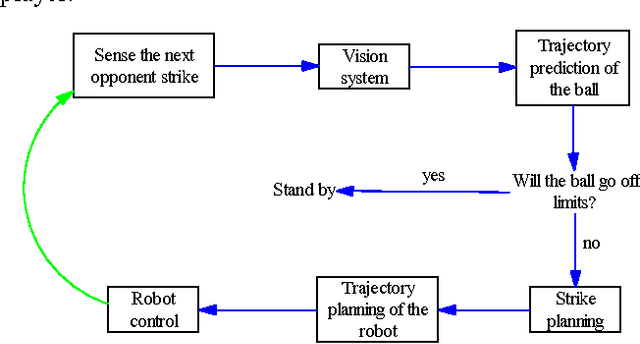
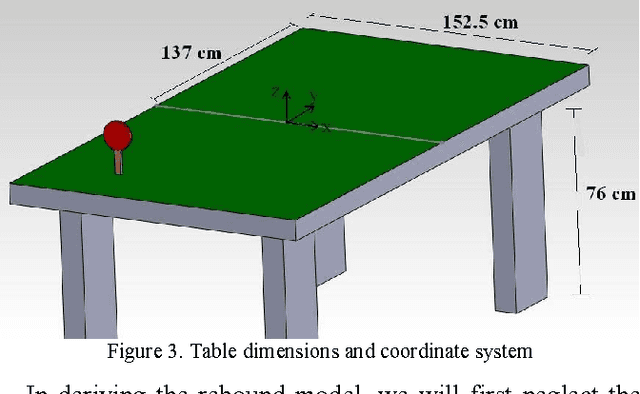
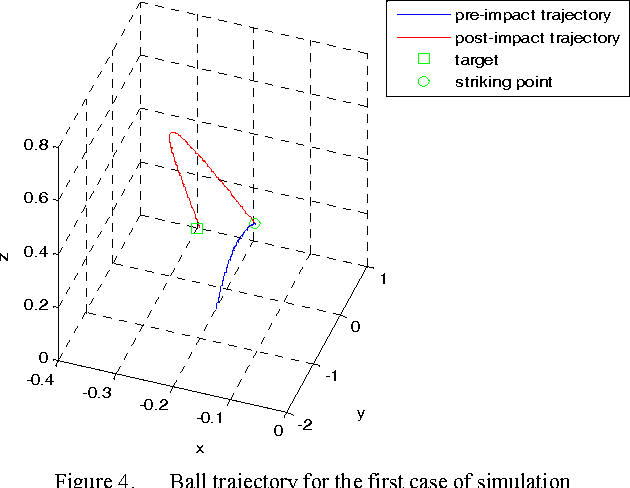
This paper illustrates how a 3 degrees of freedom, Cartesian robot can be given the task of playing ping pong against a human player. We present an algorithm based on particle swarm optimization for the robot to calculate when and how to hit an approaching ball. Simulation results are shown to depict the effectiveness of our approach. Although emphasis is placed on sending the ball to a desired point on the ping pong table, it is shown that our method may be adjusted to meet the requirements of a variety of ball hitting strategies.
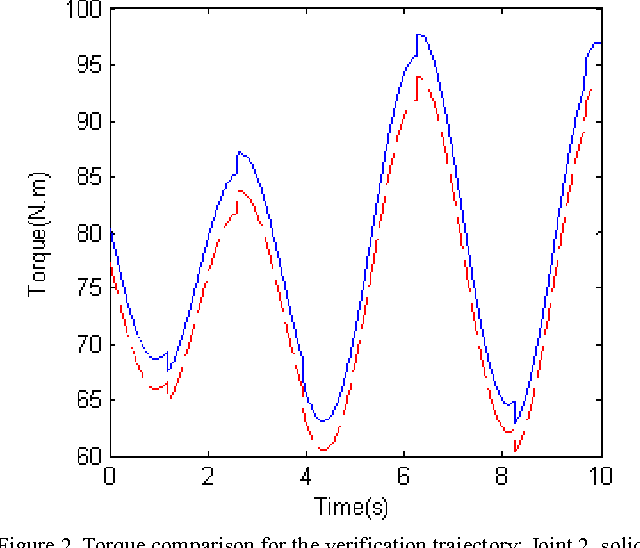
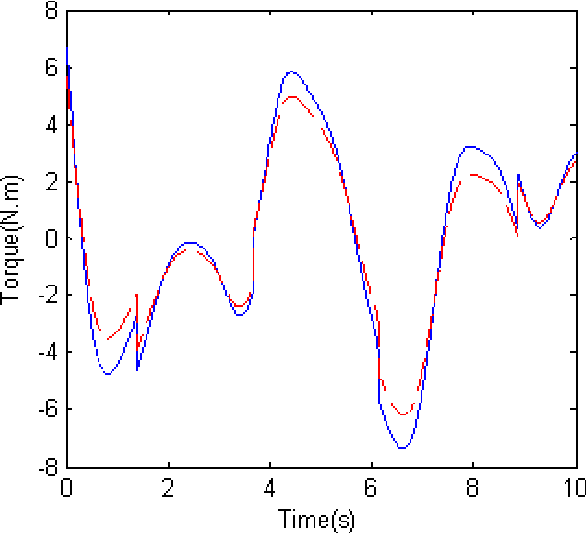
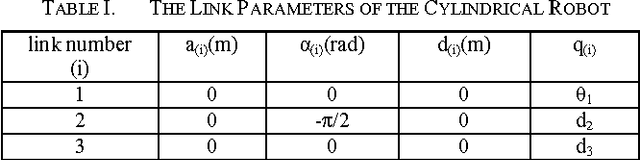
Use of PSO in Parameter Estimation of Robot Dynamics; Part Two: Robustness
Nov 06, 2012
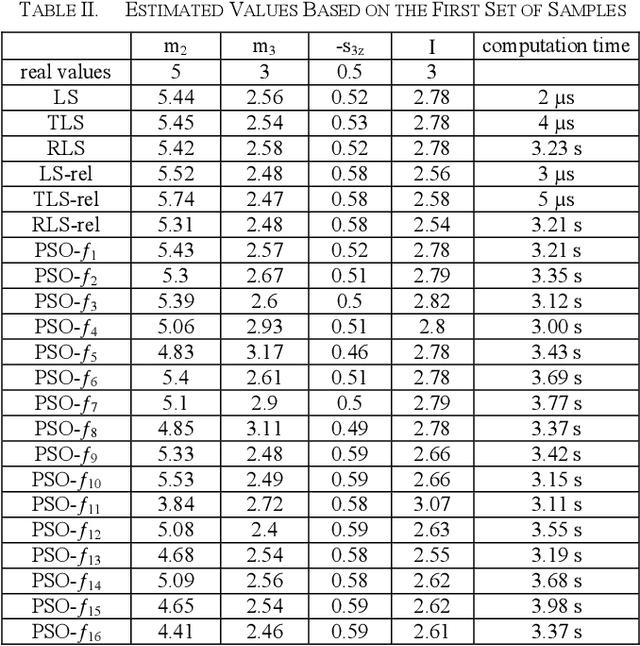
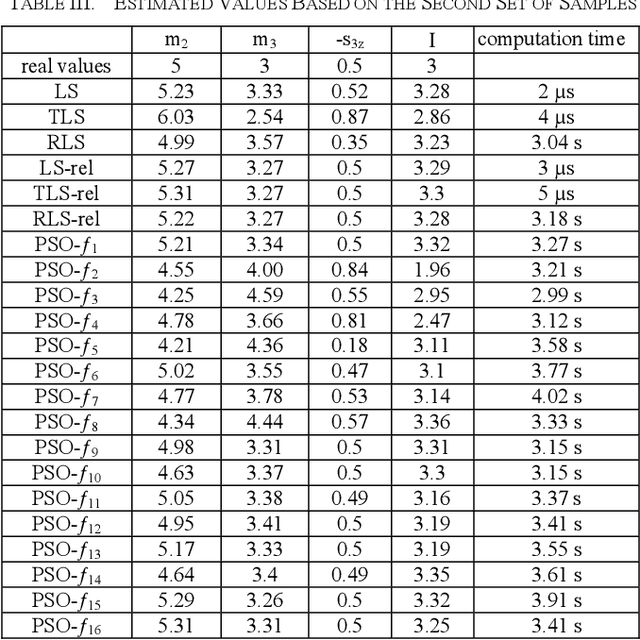
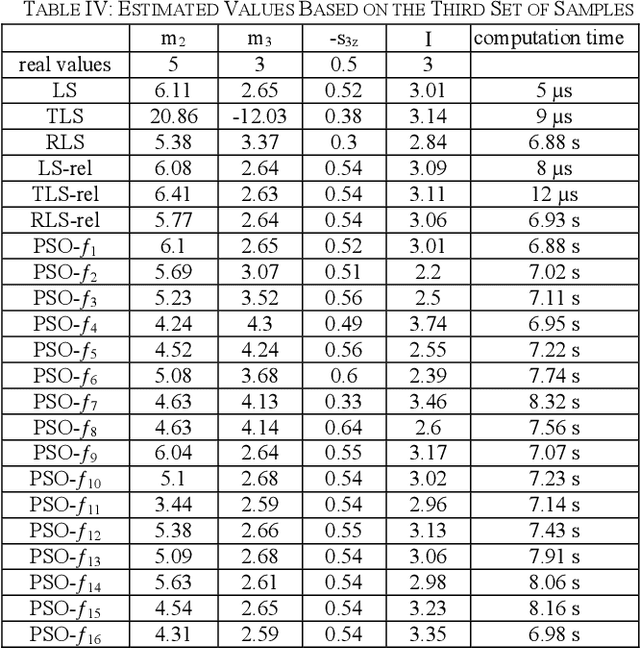
In this paper, we analyze the robustness of the PSO-based approach to parameter estimation of robot dynamics presented in Part One. We have made attempts to make the PSO method more robust by experimenting with potential cost functions. The simulated system is a cylindrical robot; through simulation, the robot is excited, samples are taken, error is added to the samples, and the noisy samples are used for estimating the robot parameters through the presented method. Comparisons are made with the least squares, total least squares, and robust least squares methods of estimation.