Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUse of PSO in Parameter Estimation of Robot Dynamics; Part Two: Robustness
Paper and Code
Nov 06, 2012
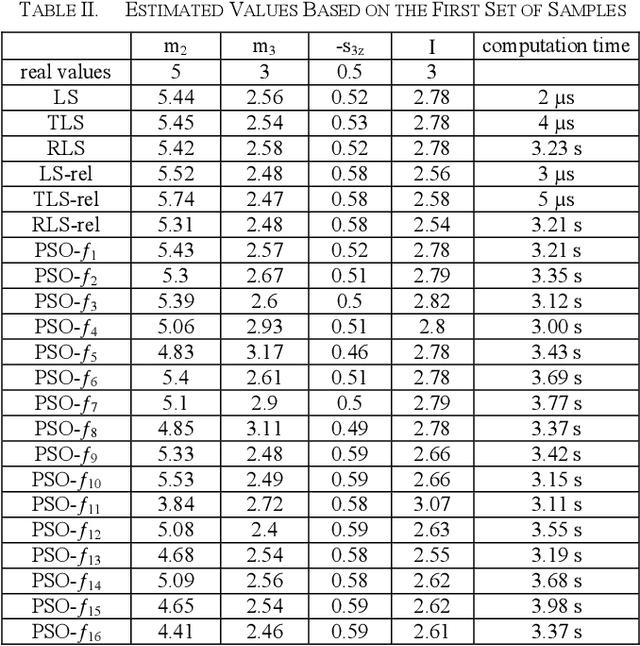
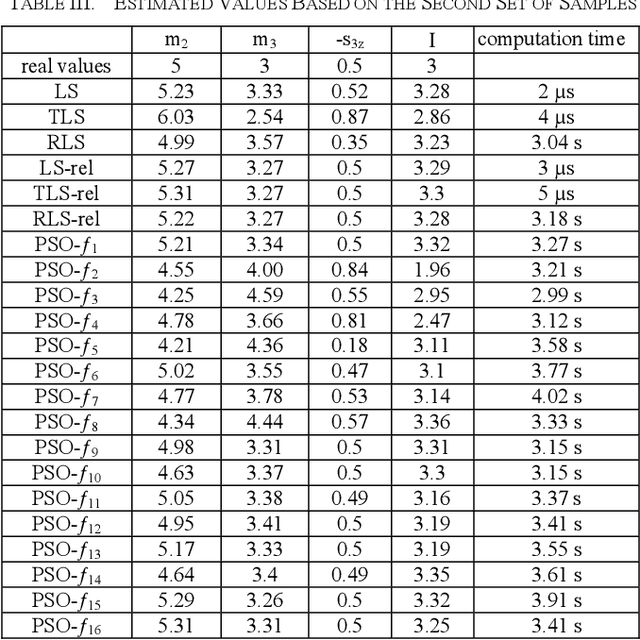
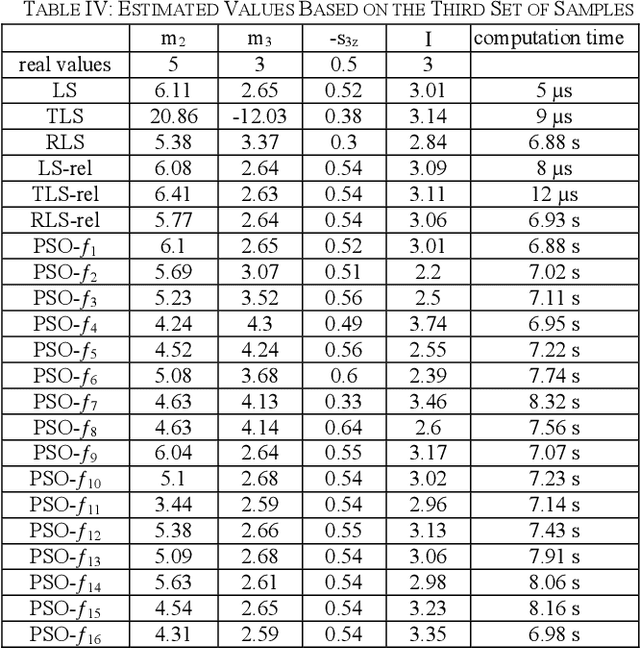
In this paper, we analyze the robustness of the PSO-based approach to parameter estimation of robot dynamics presented in Part One. We have made attempts to make the PSO method more robust by experimenting with potential cost functions. The simulated system is a cylindrical robot; through simulation, the robot is excited, samples are taken, error is added to the samples, and the noisy samples are used for estimating the robot parameters through the presented method. Comparisons are made with the least squares, total least squares, and robust least squares methods of estimation.
* 6 pages, 1 figure, 5 tables, Published in the International
Conference on System Theory, Control and Computing 2012 (IEEE) Proceedings,
to be indexed in IEEExplore
View paper on