Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBall Striking Algorithm for a 3 DOF Ping-Pong Playing Robot Based on Particle Swarm Optimization
Nov 06, 2012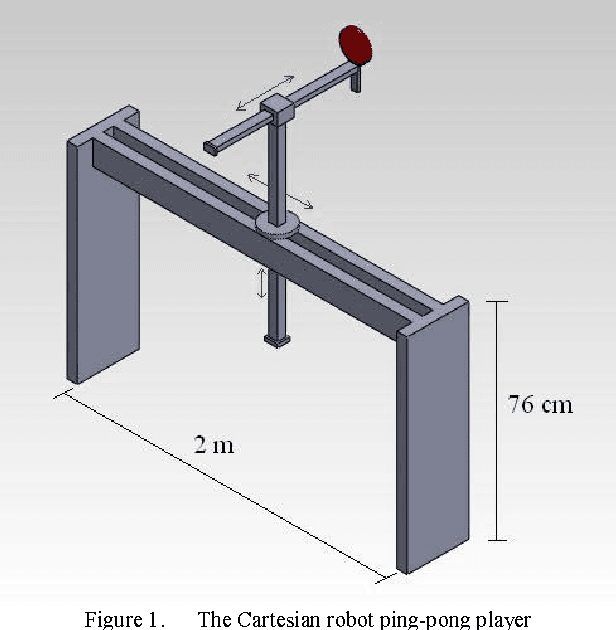
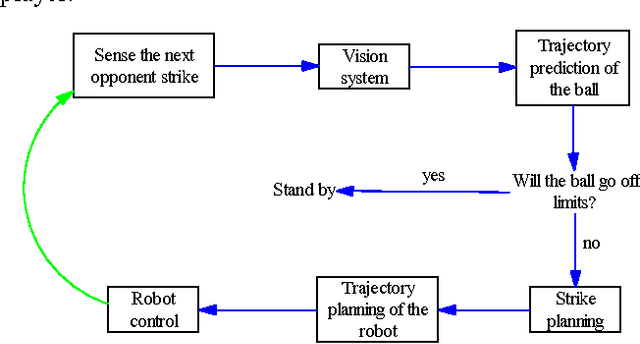
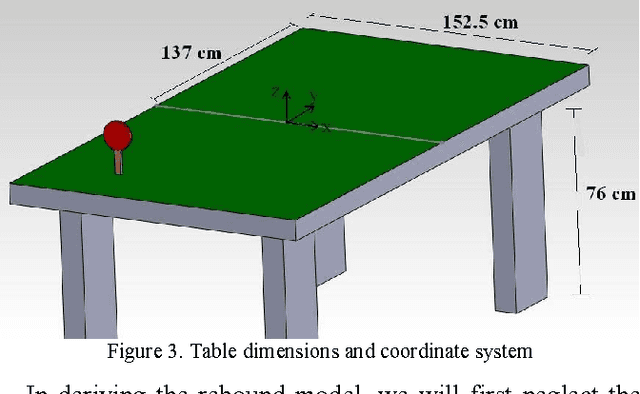
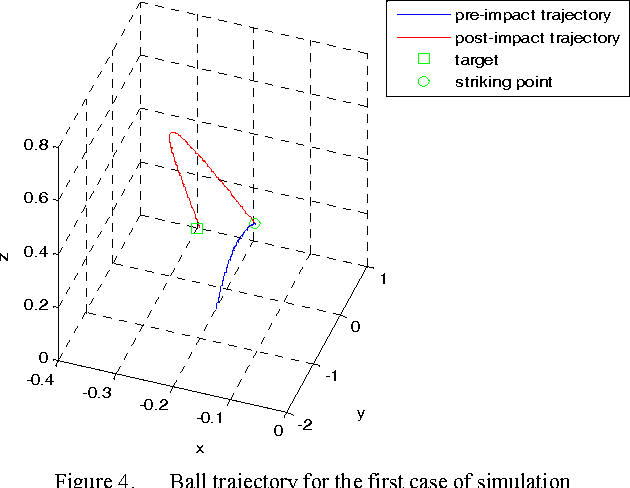
This paper illustrates how a 3 degrees of freedom, Cartesian robot can be given the task of playing ping pong against a human player. We present an algorithm based on particle swarm optimization for the robot to calculate when and how to hit an approaching ball. Simulation results are shown to depict the effectiveness of our approach. Although emphasis is placed on sending the ball to a desired point on the ping pong table, it is shown that our method may be adjusted to meet the requirements of a variety of ball hitting strategies.
* 6 pages, 6 figures, 1 table, Published in the International
Conference on System Theory, Control and Computing 2012 (IEEE) Proceedings,
to be indexed in IEEExplore
Via