 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeteroHBA: A Generative Structure-Manipulating Backdoor Attack on Heterogeneous Graphs
Dec 31, 2025Heterogeneous graph neural networks (HGNNs) have achieved strong performance in many real-world applications, yet targeted backdoor poisoning on heterogeneous graphs remains less studied. We consider backdoor attacks for heterogeneous node classification, where an adversary injects a small set of trigger nodes and connections during training to force specific victim nodes to be misclassified into an attacker-chosen label at test time while preserving clean performance. We propose HeteroHBA, a generative backdoor framework that selects influential auxiliary neighbors for trigger attachment via saliency-based screening and synthesizes diverse trigger features and connection patterns to better match the local heterogeneous context. To improve stealthiness, we combine Adaptive Instance Normalization (AdaIN) with a Maximum Mean Discrepancy (MMD) loss to align the trigger feature distribution with benign statistics, thereby reducing detectability, and we optimize the attack with a bilevel objective that jointly promotes attack success and maintains clean accuracy. Experiments on multiple real-world heterogeneous graphs with representative HGNN architectures show that HeteroHBA consistently achieves higher attack success than prior backdoor baselines with comparable or smaller impact on clean accuracy; moreover, the attack remains effective under our heterogeneity-aware structural defense, CSD. These results highlight practical backdoor risks in heterogeneous graph learning and motivate the development of stronger defenses.
HeteroBA: A Structure-Manipulating Backdoor Attack on Heterogeneous Graphs
May 27, 2025Heterogeneous graph neural networks (HGNNs) have recently drawn increasing attention for modeling complex multi-relational data in domains such as recommendation, finance, and social networks. While existing research has been largely focused on enhancing HGNNs' predictive performance, their robustness and security, especially under backdoor attacks, remain underexplored. In this paper, we propose a novel Heterogeneous Backdoor Attack (HeteroBA) framework for node classification tasks on heterogeneous graphs. HeteroBA inserts carefully crafted trigger nodes with realistic features and targeted structural connections, leveraging attention-based and clustering-based strategies to select influential auxiliary nodes for effective trigger propagation, thereby causing the model to misclassify specific nodes into a target label while maintaining accuracy on clean data. Experimental results on three datasets and various HGNN architectures demonstrate that HeteroBA achieves high attack success rates with minimal impact on the clean accuracy. Our method sheds light on potential vulnerabilities in HGNNs and calls for more robust defenses against backdoor threats in multi-relational graph scenarios.
Top K Enhanced Reinforcement Learning Attacks on Heterogeneous Graph Node Classification
Aug 04, 2024Graph Neural Networks (GNNs) have attracted substantial interest due to their exceptional performance on graph-based data. However, their robustness, especially on heterogeneous graphs, remains underexplored, particularly against adversarial attacks. This paper proposes HeteroKRLAttack, a targeted evasion black-box attack method for heterogeneous graphs. By integrating reinforcement learning with a Top-K algorithm to reduce the action space, our method efficiently identifies effective attack strategies to disrupt node classification tasks. We validate the effectiveness of HeteroKRLAttack through experiments on multiple heterogeneous graph datasets, showing significant reductions in classification accuracy compared to baseline methods. An ablation study underscores the critical role of the Top-K algorithm in enhancing attack performance. Our findings highlight potential vulnerabilities in current models and provide guidance for future defense strategies against adversarial attacks on heterogeneous graphs.
Experimental Investigation on the Friction-induced Vibration with Periodic Characteristics in a Running-in Process under Lubrication
Nov 24, 2021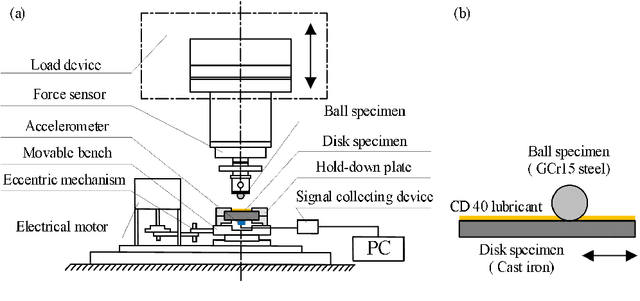
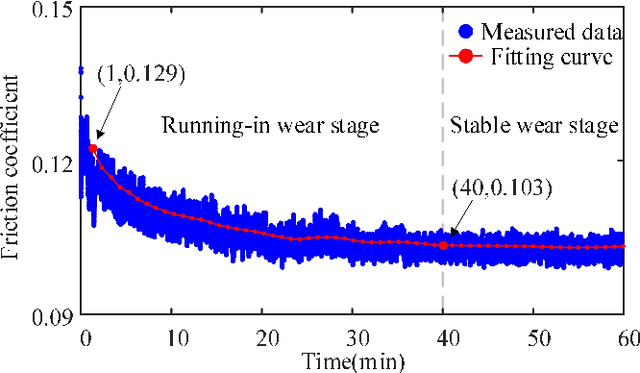
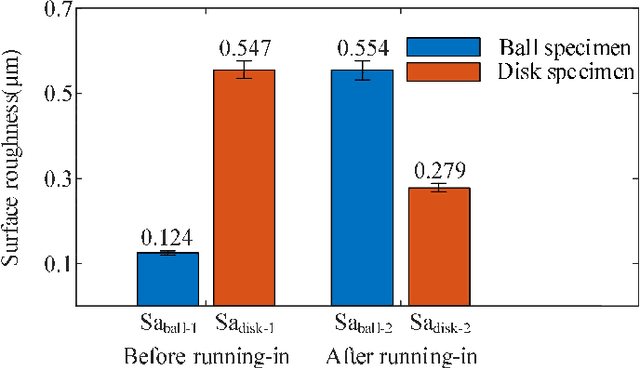
This paper investigated the friction-induced vibration (FIV) behavior under the running-in process with oil lubrication. The FIV signal with periodic characteristics under lubrication was identified with the help of the squeal signal induced in an oil-free wear experiment and then extracted by the harmonic wavelet packet transform (HWPT). The variation of the FIV signal from running-in wear stage to steady wear stage was studied by its root mean square (RMS) values. The result indicates that the time-frequency characteristics of the FIV signals evolve with the wear process and can reflect the wear stages of the friction pairs. The RMS evolvement of the FIV signal is in the same trend to the composite surface roughness and demonstrates that the friction pair goes through the running-in wear stage and the steady wear stage. Therefore, the FIV signal with periodic characteristics can describe the evolvement of the running-in process and distinguish the running-in wear stage and the stable wear stage of the friction pair.