 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Biomimetic Morphing Dorsal Fin Affects the Swimming Performance of a Free-swimming Tuna Robot
Oct 19, 2023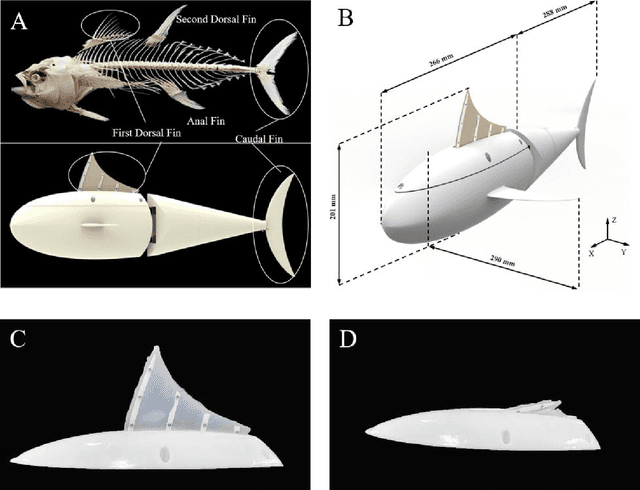
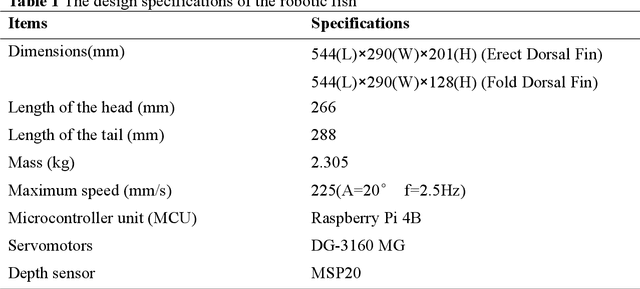
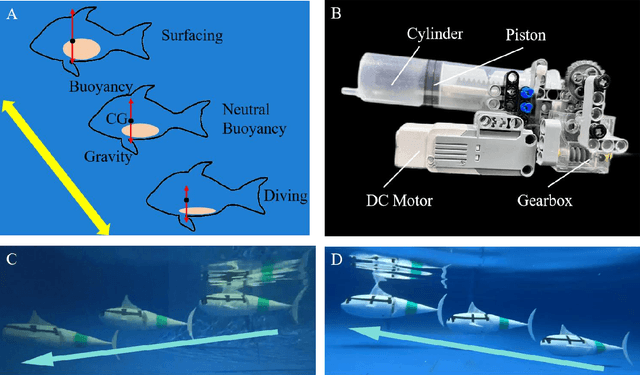
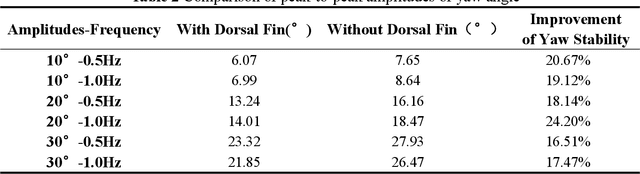
It is well known that tuna fish in the ocean can dynamically morph their median fins to achieve optimal hydrodynamic performance, e.g. linear acceleration and maneuverability. In this study, based on the previous studies about the median fin's hydrodynamic effects focusing on tethered conditions, we continue to explore the hydrodynamic function of tuna morphing dorsal fin in free swimming conditions for better approaching real-life situations.Here, we developed a tuna-inspired robotic fish platform that can swim independently in three dimensions, equipped with a biomimetic morphing dorsal fin magnetically attached to the robotic fish. Based on the free-swimming robotic fish platform, we investigated how the erected dorsal fin affects the speed, cost of transport (COT), and robotic fish's yaw angle at different frequencies and amplitudes. The erected dorsal fin plays a positive role in improving the yaw stability of robotic fish. However, it shows little influence on the speed and COT in our test. This remains to be further investigated in the future.