 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMomentum Boosted Episodic Memory for Improving Learning in Long-Tailed RL Environments
Apr 08, 2025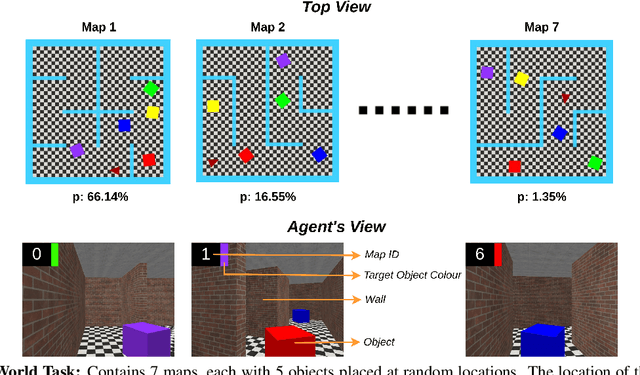
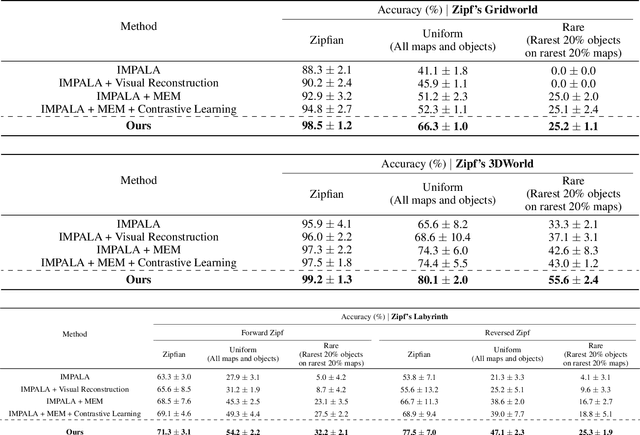
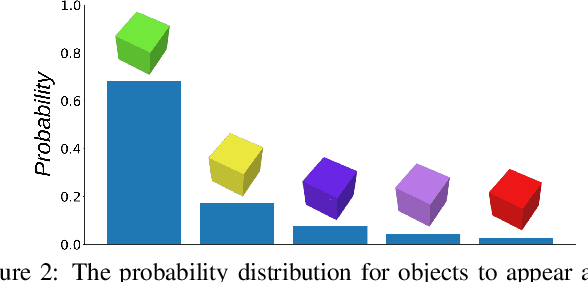
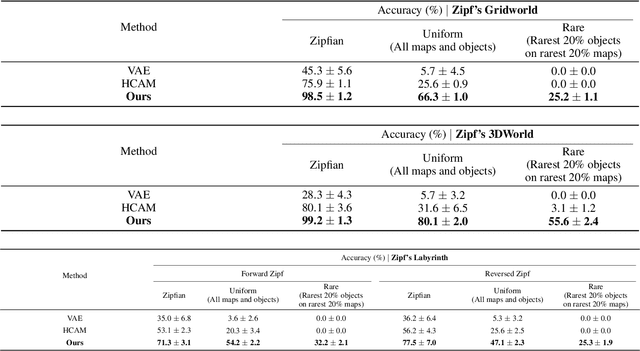
Traditional Reinforcement Learning (RL) algorithms assume the distribution of the data to be uniform or mostly uniform. However, this is not the case with most real-world applications like autonomous driving or in nature where animals roam. Some experiences are encountered frequently, and most of the remaining experiences occur rarely; the resulting distribution is called Zipfian. Taking inspiration from the theory of complementary learning systems, an architecture for learning from Zipfian distributions is proposed where important long tail trajectories are discovered in an unsupervised manner. The proposal comprises an episodic memory buffer containing a prioritised memory module to ensure important rare trajectories are kept longer to address the Zipfian problem, which needs credit assignment to happen in a sample efficient manner. The experiences are then reinstated from episodic memory and given weighted importance forming the trajectory to be executed. Notably, the proposed architecture is modular, can be incorporated in any RL architecture and yields improved performance in multiple Zipfian tasks over traditional architectures. Our method outperforms IMPALA by a significant margin on all three tasks and all three evaluation metrics (Zipfian, Uniform, and Rare Accuracy) and also gives improvements on most Atari environments that are considered challenging
Adaptive Steering Control for Steer-by-Wire Systems
Sep 17, 2021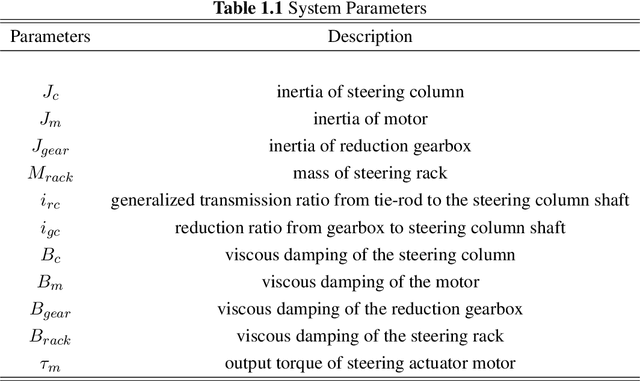
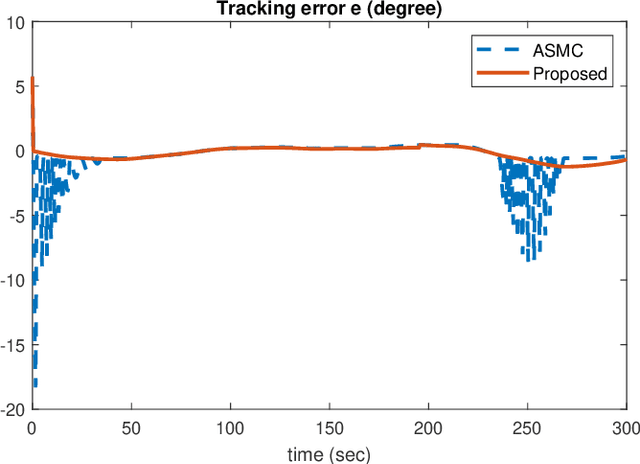

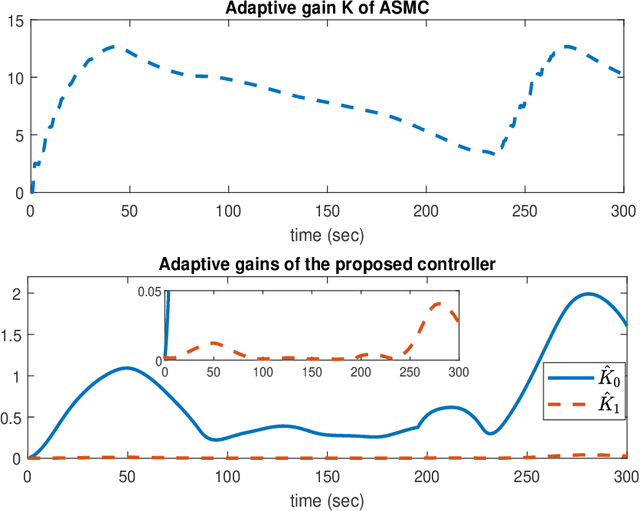
Steer-by-Wire (SBW) systems are being adapted widely in semi-autonomous and fully autonomous vehicles. The main control challenge in a SBW system is to follow the steering commands in the face of parametric uncertainties, external disturbances and actuator delay; crucially, perturbations in inertial parameters and damping forces give rise to state-dependent uncertainties, which cannot be bounded a priori by a constant. However, the state-of-the-art control methods of SBW system rely on a priori bounded uncertainties, and thus, become inapplicable when state-dependent dynamics become unknown. In addition, ensuring tracking accuracy under actuator delay is always a challenging task. This work proposes two control frameworks to overcome these challenges. Firstly, an adaptive controller is proposed to tackle the state-dependent uncertainties and external disturbances in a typical SBW system without any a priori knowledge of their structures and of their bounds. The stability of the closed-loop system is studied analytically via uniformly ultimately bounded notion and the effectiveness of the proposed solution is verified via simulations against the state-of-the-art solution. While this proposed controller handles the uncertainties and external perturbations, it does not consider the actuator delay which sometimes result in decreased accuracy. Therefore, a new adaptive-robust control framework is devised to tackle the same control problem of an SBW system under the influence of time-varying input delay. In comparison to the existing strategies, the proposed framework removes the conservative assumption of a priori bounded uncertainty and, in addition, the Razumikhin theorem based stability analysis allows the proposed scheme to deal with arbitrary variation in input delay. The effectiveness of the both controllers is proved using comparative simulation studies.