 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-Definition Map Generation Technologies For Autonomous Driving: A Review
Jun 11, 2022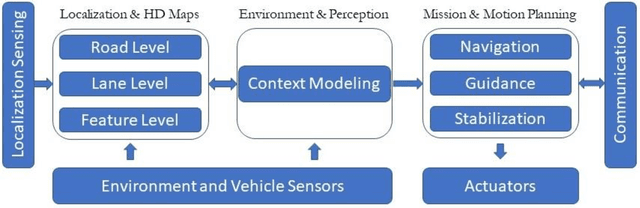
Autonomous driving has been among the most popular and challenging topics in the past few years. On the road to achieving full autonomy, researchers have utilized various sensors, such as LiDAR, camera, Inertial Measurement Unit (IMU), and GPS, and developed intelligent algorithms for autonomous driving applications such as object detection, object segmentation, obstacle avoidance, and path planning. High-definition (HD) maps have drawn lots of attention in recent years. Because of the high precision and informative level of HD maps in localization, it has immediately become one of the critical components of autonomous driving. From big organizations like Baidu Apollo, NVIDIA, and TomTom to individual researchers, researchers have created HD maps for different scenes and purposes for autonomous driving. It is necessary to review the state-of-the-art methods for HD map generation. This paper reviews recent HD map generation technologies that leverage both 2D and 3D map generation. This review introduces the concept of HD maps and their usefulness in autonomous driving and gives a detailed overview of HD map generation techniques. We will also discuss the limitations of the current HD map generation technologies to motivate future research.
Dynamic Modeling and Simulation of a Four-wheel Skid-Steer Mobile Robot using Linear Graphs
Oct 01, 2021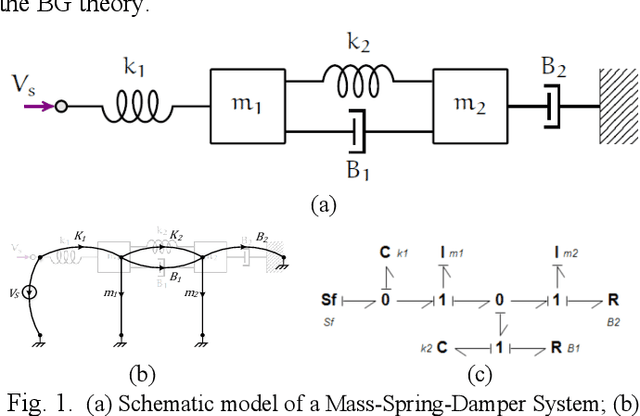
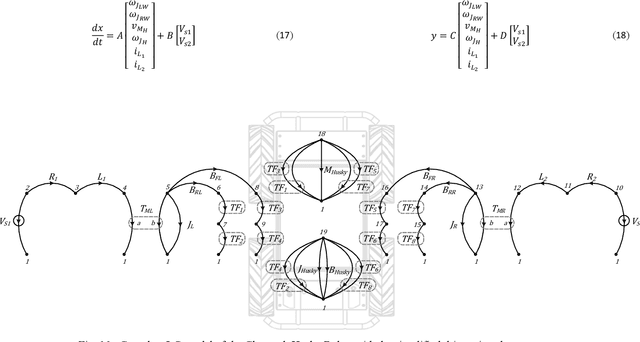

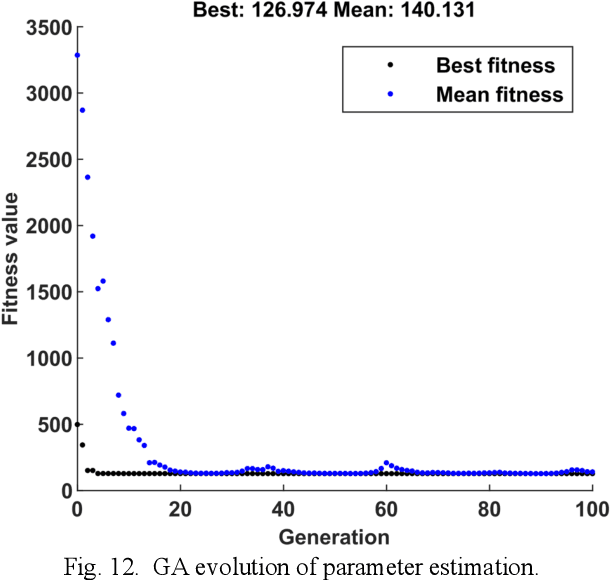
This paper presents the application of the concepts and approaches of linear graph (LG) theory in the modeling and simulation of a 4-wheel skid-steer mobile robotic system. An LG representation of the system is proposed and the accompanying state-space model of the dynamics of a mobile robot system is evaluated using the associated LGtheory MATLAB toolbox, which was developed in our lab. A genetic algorithm (GA)-based parameter estimation method is employed to determine the system parameters, which leads to a very accurate simulation of the model. The developed model is then evaluated and validated by comparing the simulated LG model trajectory with the trajectory of a ROS Gazebo simulated robot and experimental data obtained from the physical robotic system. The obtained results demonstrate that the proposed LG model, combined with the GA parameter estimation process, produces a highly accurate method of modeling and simulating a mobile robotic system.