 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Tightly-Coupled GPS Fused LIO-SLAM
Sep 20, 2022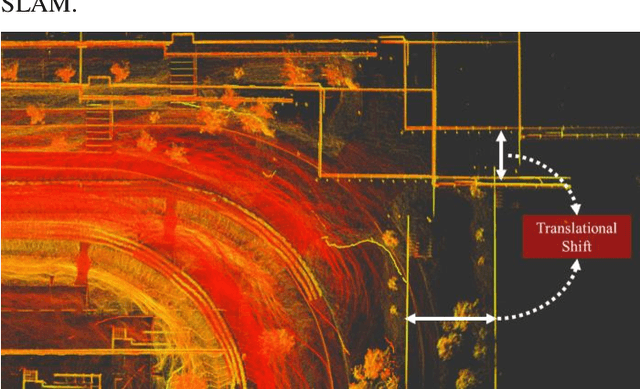

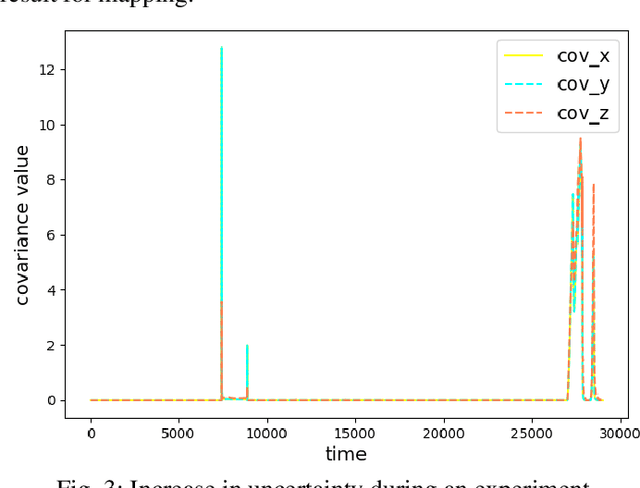
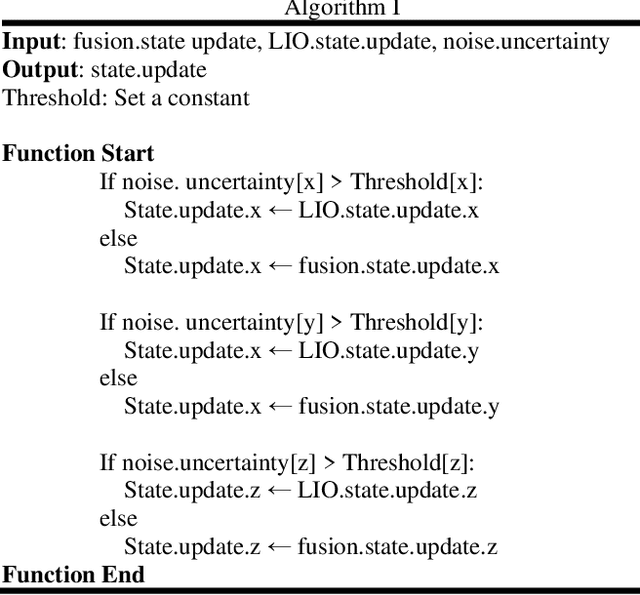
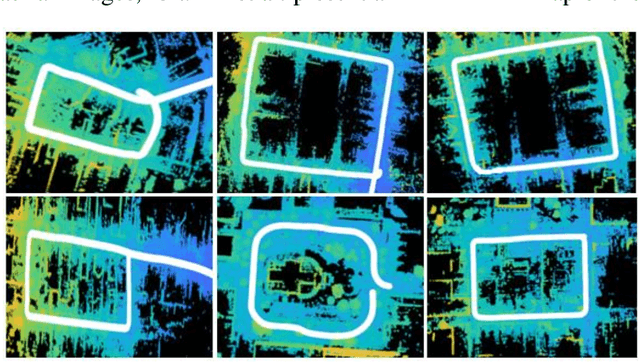
Delivery robots aim to achieve high precision to facilitate complete autonomy. A precise three-dimensional point cloud map of sidewalk surroundings is required to estimate self-location. With or without the loop closing method, the cumulative error increases gradually after mapping for larger urban or city maps due to sensor drift. Therefore, there is a high risk of using the drifted or misaligned map. This article presented a technique for fusing GPS to update the 3D point cloud and eliminate cumulative error. The proposed method shows outstanding results in quantitative comparison and qualitative evaluation with other existing methods.
High-Definition Map Generation Technologies For Autonomous Driving: A Review
Jun 11, 2022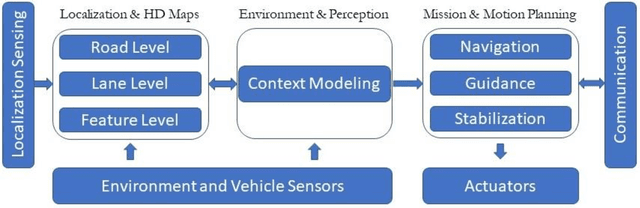
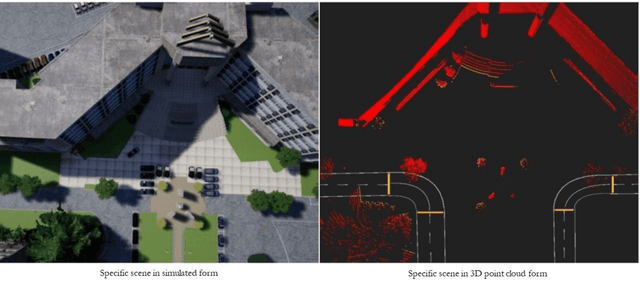
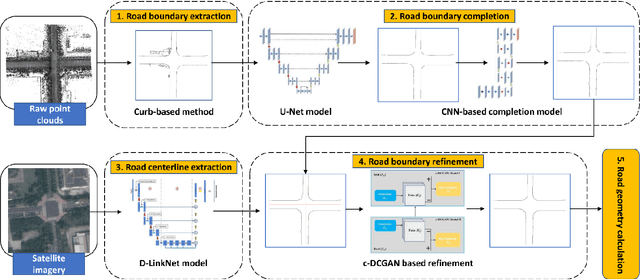
Autonomous driving has been among the most popular and challenging topics in the past few years. On the road to achieving full autonomy, researchers have utilized various sensors, such as LiDAR, camera, Inertial Measurement Unit (IMU), and GPS, and developed intelligent algorithms for autonomous driving applications such as object detection, object segmentation, obstacle avoidance, and path planning. High-definition (HD) maps have drawn lots of attention in recent years. Because of the high precision and informative level of HD maps in localization, it has immediately become one of the critical components of autonomous driving. From big organizations like Baidu Apollo, NVIDIA, and TomTom to individual researchers, researchers have created HD maps for different scenes and purposes for autonomous driving. It is necessary to review the state-of-the-art methods for HD map generation. This paper reviews recent HD map generation technologies that leverage both 2D and 3D map generation. This review introduces the concept of HD maps and their usefulness in autonomous driving and gives a detailed overview of HD map generation techniques. We will also discuss the limitations of the current HD map generation technologies to motivate future research.
Efficient Stereo Depth Estimation for Pseudo LiDAR: A Self-Supervised Approach Based on Multi-Input ResNet Encoder
May 17, 2022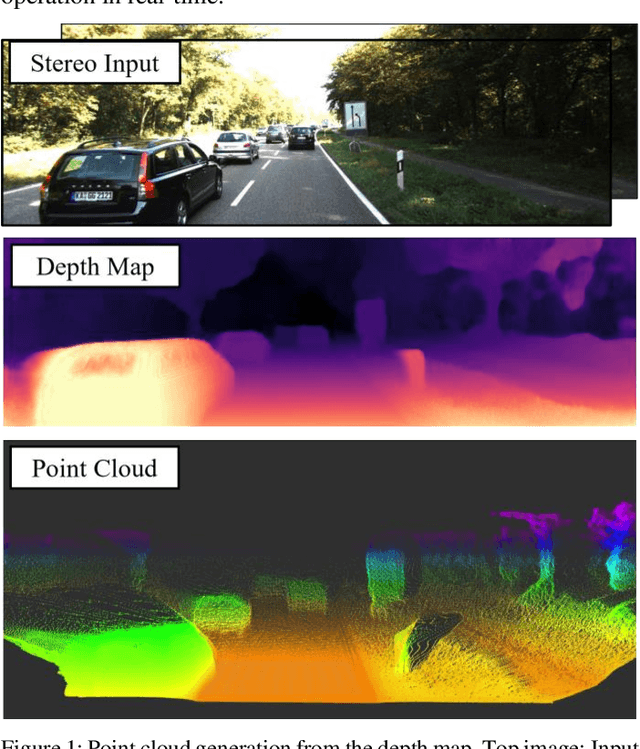

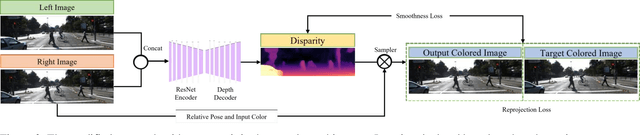

Perception and localization are essential for autonomous delivery vehicles, mostly estimated from 3D LiDAR sensors due to their precise distance measurement capability. This paper presents a strategy to obtain the real-time pseudo point cloud instead of the laser sensor from the image sensor. We propose an approach to use different depth estimators to obtain pseudo point clouds like LiDAR to obtain better performance. Moreover, the training and validating strategy of the depth estimator has adopted stereo imagery data to estimate more accurate depth estimation as well as point cloud results. Our approach to generating depth maps outperforms on KITTI benchmark while yielding point clouds significantly faster than other approaches.