Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Tightly-Coupled GPS Fused LIO-SLAM
Paper and Code
Sep 20, 2022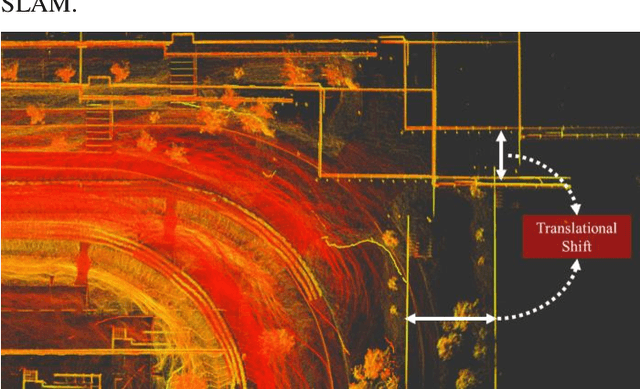

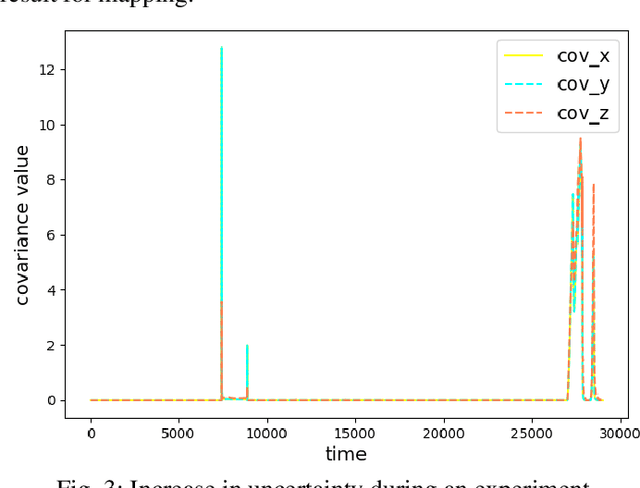
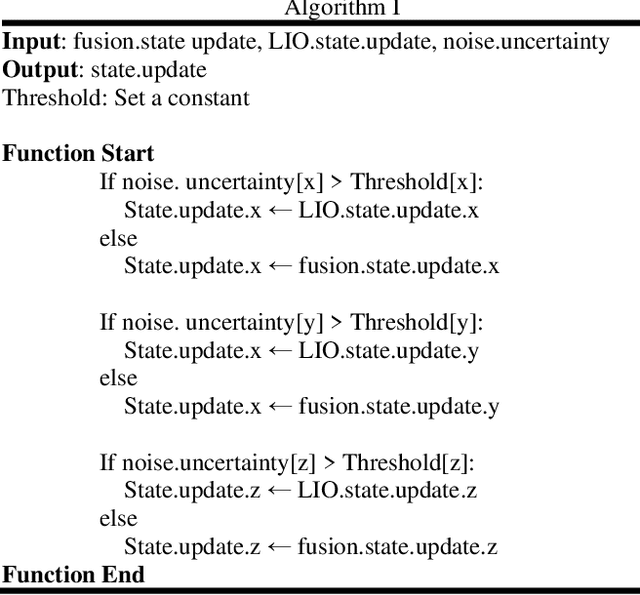
Delivery robots aim to achieve high precision to facilitate complete autonomy. A precise three-dimensional point cloud map of sidewalk surroundings is required to estimate self-location. With or without the loop closing method, the cumulative error increases gradually after mapping for larger urban or city maps due to sensor drift. Therefore, there is a high risk of using the drifted or misaligned map. This article presented a technique for fusing GPS to update the 3D point cloud and eliminate cumulative error. The proposed method shows outstanding results in quantitative comparison and qualitative evaluation with other existing methods.
* 10 pages, 11 figures
View paper on