 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Modeling and Simulation of a Four-wheel Skid-Steer Mobile Robot using Linear Graphs
Paper and Code
Oct 01, 2021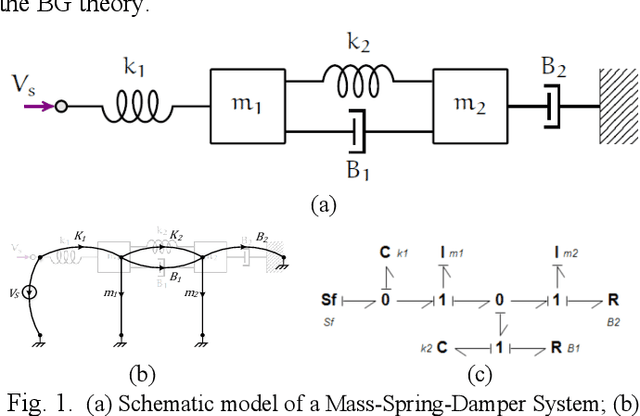
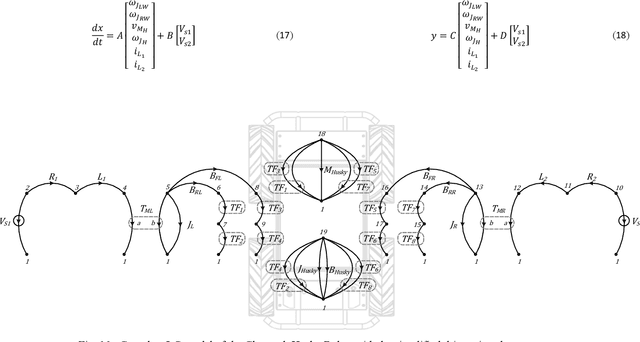

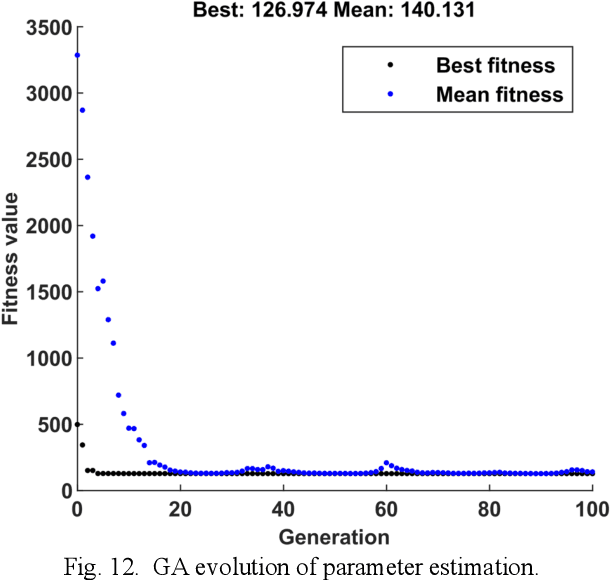
This paper presents the application of the concepts and approaches of linear graph (LG) theory in the modeling and simulation of a 4-wheel skid-steer mobile robotic system. An LG representation of the system is proposed and the accompanying state-space model of the dynamics of a mobile robot system is evaluated using the associated LGtheory MATLAB toolbox, which was developed in our lab. A genetic algorithm (GA)-based parameter estimation method is employed to determine the system parameters, which leads to a very accurate simulation of the model. The developed model is then evaluated and validated by comparing the simulated LG model trajectory with the trajectory of a ROS Gazebo simulated robot and experimental data obtained from the physical robotic system. The obtained results demonstrate that the proposed LG model, combined with the GA parameter estimation process, produces a highly accurate method of modeling and simulating a mobile robotic system.