 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Model Learning for Large Deformation Control of Elastic Deformable Linear Objects: An Efficient and Adaptive Approach
May 09, 2022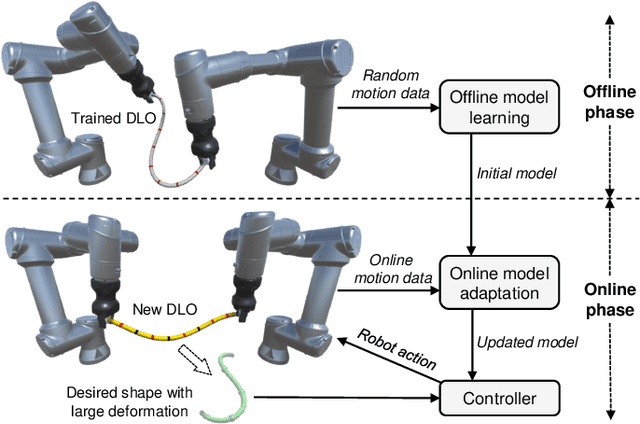

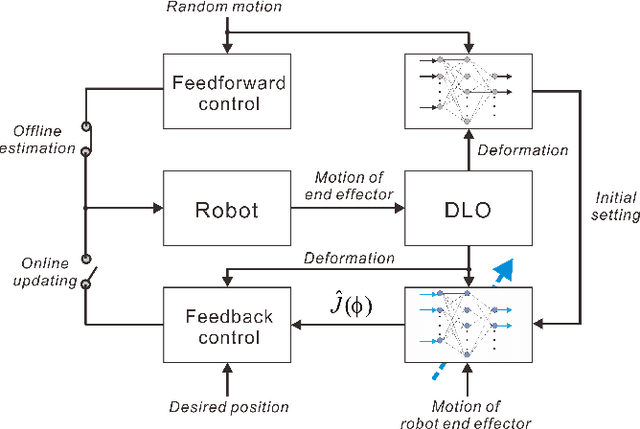
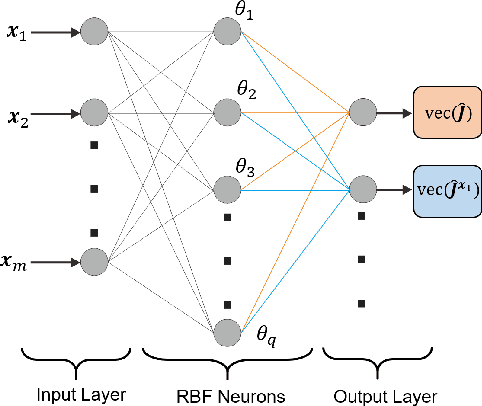
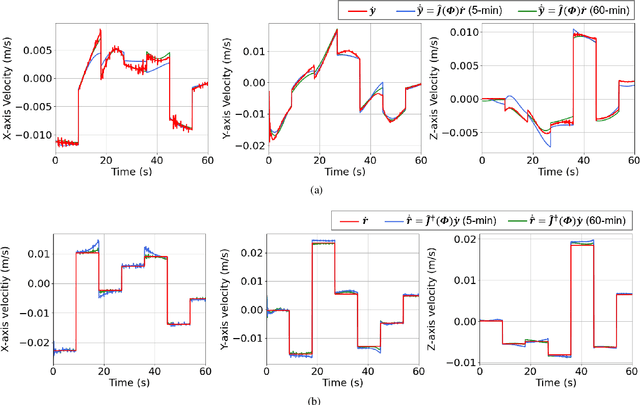
Robotic manipulation of deformable linear objects (DLOs) has broad application prospects in many fields. However, a key issue is to obtain the exact deformation models (i.e., how robot motion affects DLO deformation), which are hard to theoretically calculate and vary among different DLOs. Thus, shape control of DLOs is challenging, especially for large deformation control which requires global and more accurate models. In this paper, we propose a coupled offline and online data-driven method for efficiently learning a global deformation model, allowing for both accurate modeling through offline learning and further updating for new DLOs via online adaptation. Specifically, the model approximated by a neural network is first trained offline on random data, then seamlessly migrated to the online phase, and further updated online during actual manipulation. Several strategies are introduced to improve the model's efficiency and generalization ability. We propose a convex-optimization-based controller, and analyze the system's stability using the Lyapunov method. Detailed simulations and real-world experiments demonstrate that our method can efficiently and precisely estimate the deformation model, and achieve large deformation control of untrained DLOs in 2D and 3D dual-arm manipulation tasks better than the existing methods. It accomplishes all 24 tasks with different desired shapes on different DLOs in the real world, using only simulation data for the offline learning.
Shape Control of Deformable Linear Objects with Offline and Online Learning of Local Linear Deformation Models
Sep 23, 2021


The shape control of deformable linear objects (DLOs) is challenging, since it is difficult to obtain the deformation models. Previous studies often approximate the models in purely offline or online ways. In this paper, we propose a scheme for the shape control of DLOs, where the unknown model is estimated with both offline and online learning. The model is formulated in a local linear format, and approximated by a neural network (NN). First, the NN is trained offline to provide a good initial estimation of the model, which can directly migrate to the online phase. Then, an adaptive controller is proposed to achieve the shape control tasks, in which the NN is further updated online to compensate for any errors in the offline model caused by insufficient training or changes of DLO properties. The simulation and real-world experiments show that the proposed method can precisely and efficiently accomplish the DLO shape control tasks, and adapt well to new and untrained DLOs.
Adaptive Control for Robotic Manipulation of Deformable Linear Objects with Offline and Online Learning of Unknown Models
Jul 01, 2021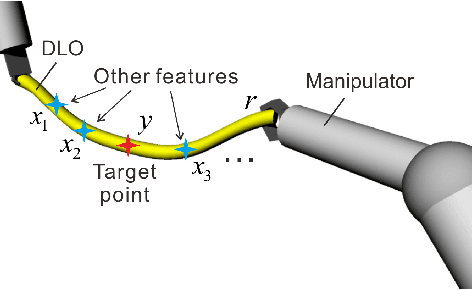
The deformable linear objects (DLOs) are common in both industrial and domestic applications, such as wires, cables, ropes. Because of its highly deformable nature, it is difficult for the robot to reproduce human's dexterous skills on DLOs. In this paper, the unknown deformation model is estimated in both the offline and online manners. The offline learning aims to provide a good approximation prior to the manipulation task, while the online learning aims to compensate the errors due to insufficient training (e.g. limited datasets) in the offline phase. The offline module works by constructing a series of supervised neural networks (NNs), then the online module receives the learning results directly and further updates them with the technique of adaptive NNs. A new adaptive controller is also proposed to allow the robot to perform manipulation tasks concurrently in the online phase. The stability of the closed-loop system and the convergence of task errors are rigorously proved with Lyapunov method. Simulation studies are presented to illustrate the performance of the proposed method.