 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy Weighted Learning Progress Guided Interleaved Multi-Task Learning
Apr 01, 2025Humans can continuously acquire new skills and knowledge by exploiting existing ones for improved learning, without forgetting them. Similarly, 'continual learning' in machine learning aims to learn new information while preserving the previously acquired knowledge. Existing research often overlooks the nature of human learning, where tasks are interleaved due to human choice or environmental constraints. So, almost never do humans master one task before switching to the next. To investigate to what extent human-like learning can benefit the learner, we propose a method that interleaves tasks based on their 'learning progress' and energy consumption. From a machine learning perspective, our approach can be seen as a multi-task learning system that balances learning performance with energy constraints while mimicking ecologically realistic human task learning. To assess the validity of our approach, we consider a robot learning setting in simulation, where the robot learns the effect of its actions in different contexts. The conducted experiments show that our proposed method achieves better performance than sequential task learning and reduces energy consumption for learning the tasks.
Bidirectional Progressive Neural Networks with Episodic Return Progress for Emergent Task Sequencing and Robotic Skill Transfer
Mar 06, 2024
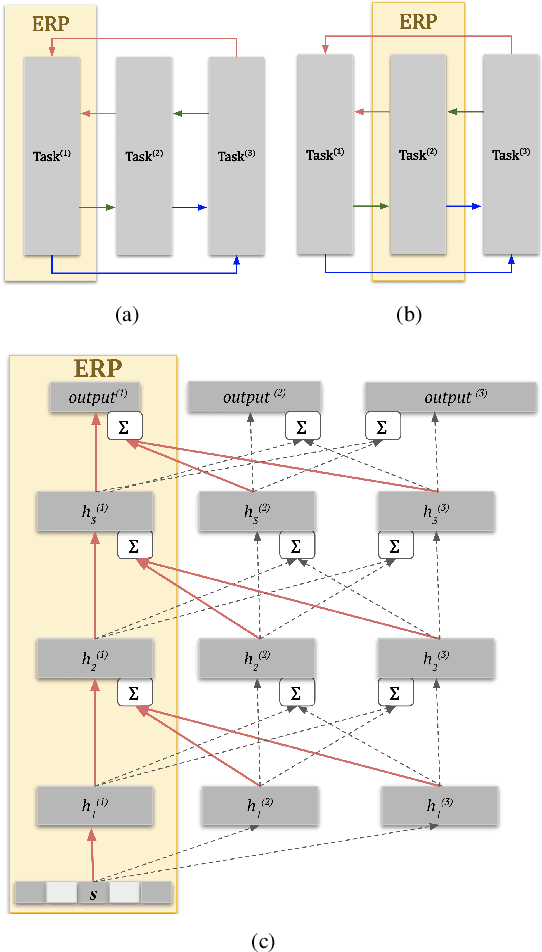
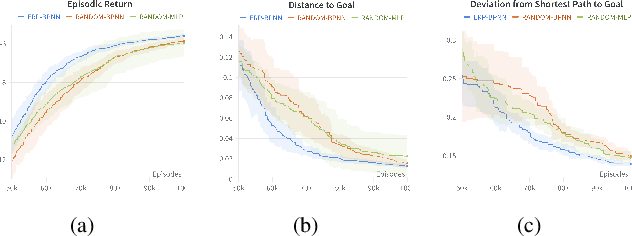

Human brain and behavior provide a rich venue that can inspire novel control and learning methods for robotics. In an attempt to exemplify such a development by inspiring how humans acquire knowledge and transfer skills among tasks, we introduce a novel multi-task reinforcement learning framework named Episodic Return Progress with Bidirectional Progressive Neural Networks (ERP-BPNN). The proposed ERP-BPNN model (1) learns in a human-like interleaved manner by (2) autonomous task switching based on a novel intrinsic motivation signal and, in contrast to existing methods, (3) allows bidirectional skill transfer among tasks. ERP-BPNN is a general architecture applicable to several multi-task learning settings; in this paper, we present the details of its neural architecture and show its ability to enable effective learning and skill transfer among morphologically different robots in a reaching task. The developed Bidirectional Progressive Neural Network (BPNN) architecture enables bidirectional skill transfer without requiring incremental training and seamlessly integrates with online task arbitration. The task arbitration mechanism developed is based on soft Episodic Return progress (ERP), a novel intrinsic motivation (IM) signal. To evaluate our method, we use quantifiable robotics metrics such as 'expected distance to goal' and 'path straightness' in addition to the usual reward-based measure of episodic return common in reinforcement learning. With simulation experiments, we show that ERP-BPNN achieves faster cumulative convergence and improves performance in all metrics considered among morphologically different robots compared to the baselines.