 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention Based Communication and Control for Multi-UAV Path Planning
Dec 20, 2021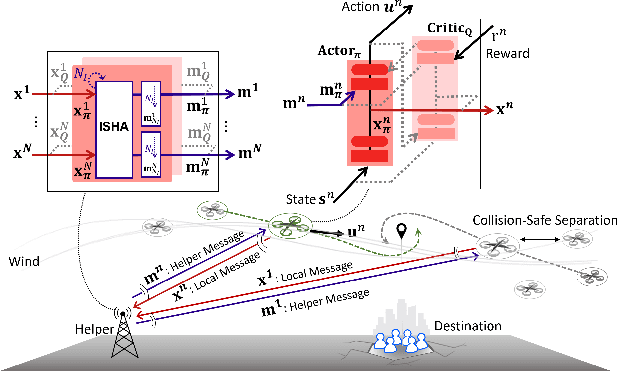
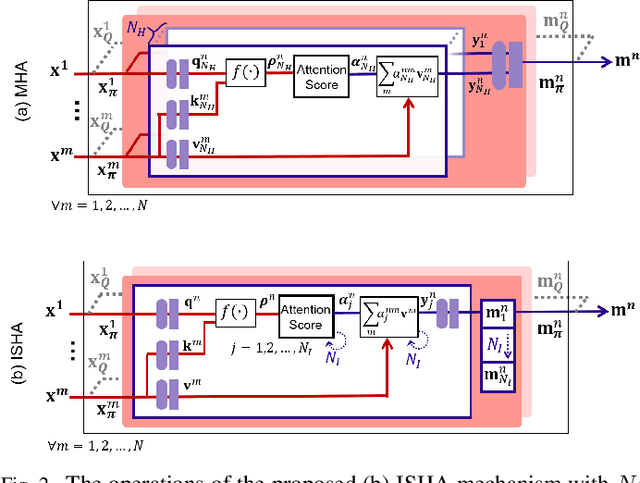
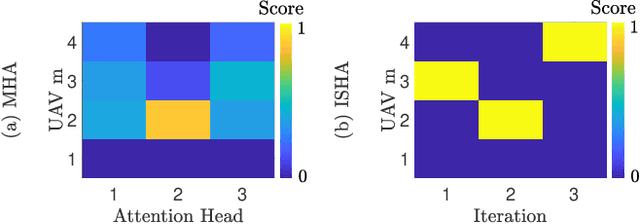
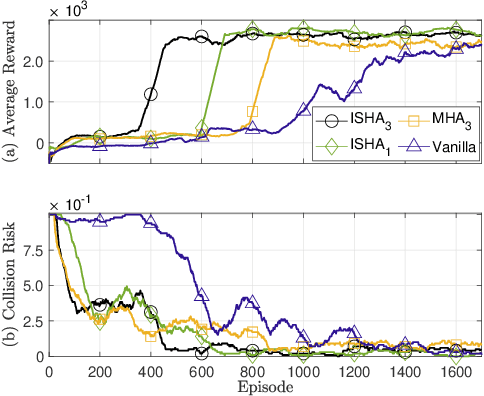
Inspired by the multi-head attention (MHA) mechanism in natural language processing, this letter proposes an iterative single-head attention (ISHA) mechanism for multi-UAV path planning. The ISHA mechanism is run by a communication helper collecting the state embeddings of UAVs and distributing an attention score vector to each UAV. The attention scores computed by ISHA identify how many interactions with other UAVs should be considered in each UAV's control decision-making. Simulation results corroborate that the ISHA-based communication and control framework achieves faster travel with lower inter-UAV collision risks than an MHA-aided baseline, particularly under limited communication resources.
Communication-Efficient Massive UAV Online Path Control: Federated Learning Meets Mean-Field Game Theory
Mar 09, 2020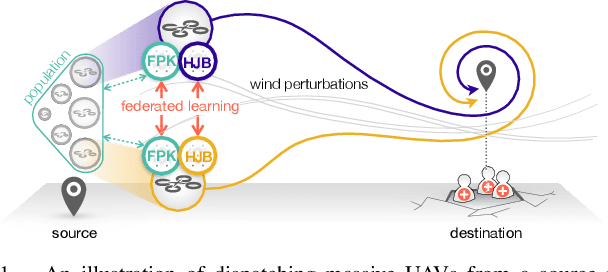
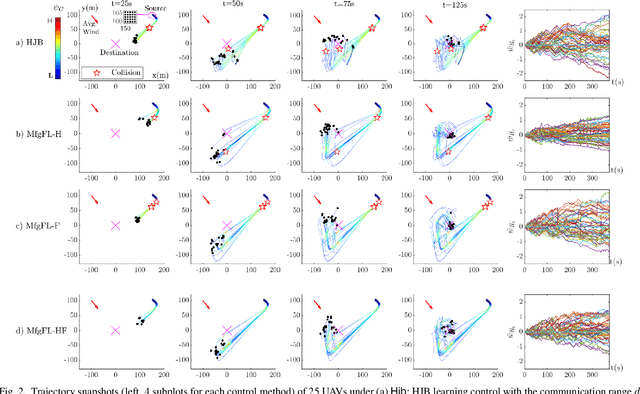
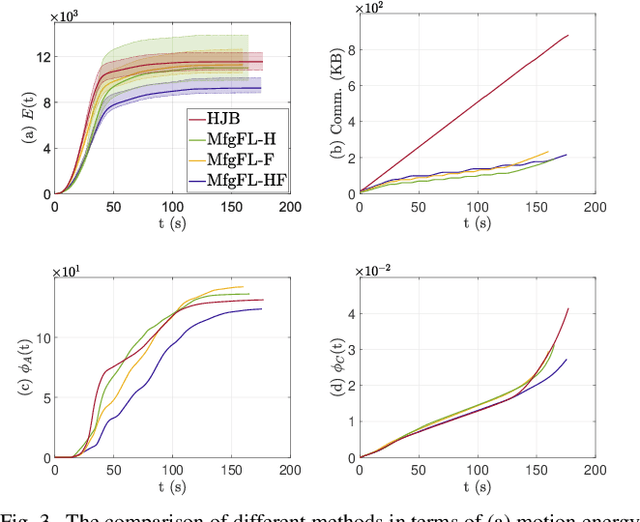
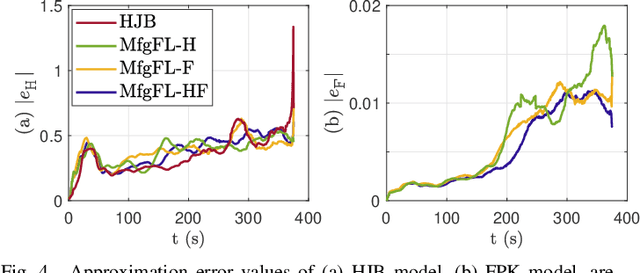
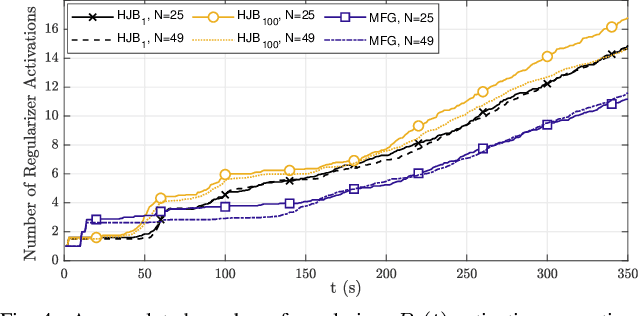
This paper investigates the control of a massive population of UAVs such as drones. The straightforward method of control of UAVs by considering the interactions among them to make a flock requires a huge inter-UAV communication which is impossible to implement in real-time applications. One method of control is to apply the mean-field game (MFG) framework which substantially reduces communications among the UAVs. However, to realize this framework, powerful processors are required to obtain the control laws at different UAVs. This requirement limits the usage of the MFG framework for real-time applications such as massive UAV control. Thus, a function approximator based on neural networks (NN) is utilized to approximate the solutions of Hamilton-Jacobi-Bellman (HJB) and Fokker-Planck-Kolmogorov (FPK) equations. Nevertheless, using an approximate solution can violate the conditions for convergence of the MFG framework. Therefore, the federated learning (FL) approach which can share the model parameters of NNs at drones, is proposed with NN based MFG to satisfy the required conditions. The stability analysis of the NN based MFG approach is presented and the performance of the proposed FL-MFG is elaborated by the simulations.
Remote UAV Online Path Planning via Neural Network Based Opportunistic Control
Oct 11, 2019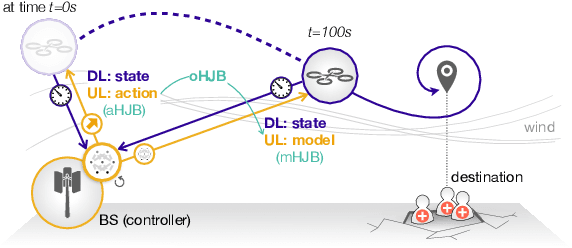
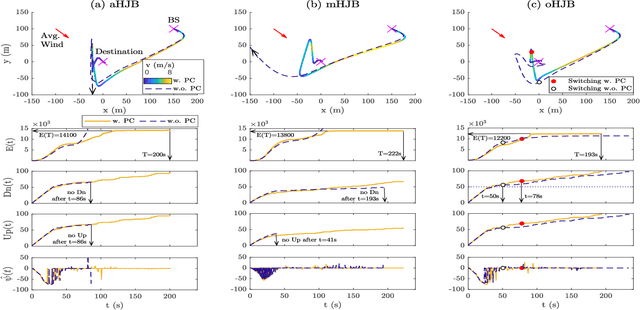
This letter proposes a neural network (NN) aided remote unmanned aerial vehicle (UAV) online control algorithm, coined oHJB. By downloading a UAV's state, a base station (BS) trains an HJB NN that solves the Hamilton-Jacobi-Bellman equation (HJB) in real time, yielding the optimal control action. Initially, the BS uploads this control action to the UAV. If the HJB NN is sufficiently trained and the UAV is far away, the BS uploads the HJB NN model, enabling to locally carry out control decisions even when the connection is lost. Simulations corroborate the effectiveness of oHJB in reducing the UAV's travel time and energy by utilizing the trade-off between uploading delays and control robustness in poor channel conditions.
Massive Autonomous UAV Path Planning: A Neural Network Based Mean-Field Game Theoretic Approach
May 10, 2019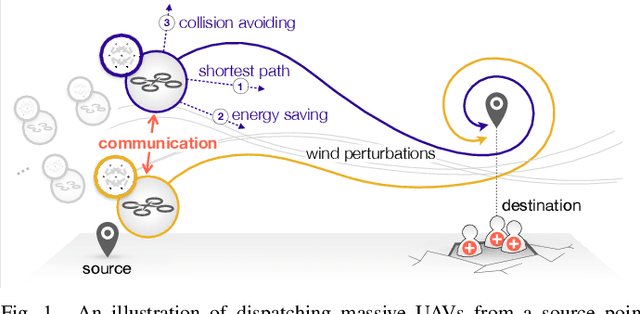
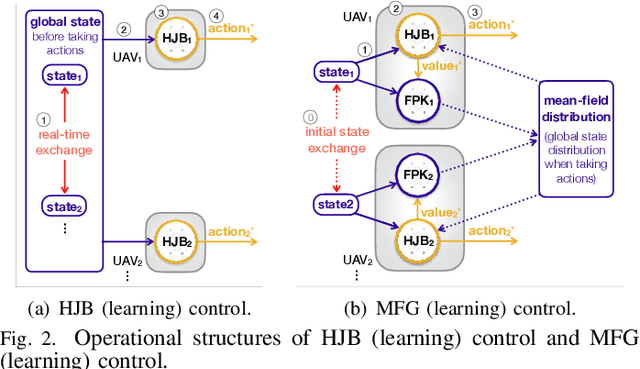

This paper investigates the autonomous control of massive unmanned aerial vehicles (UAVs) for mission-critical applications (e.g., dispatching many UAVs from a source to a destination for firefighting). Achieving their fast travel and low motion energy without inter-UAV collision under wind perturbation is a daunting control task, which incurs huge communication energy for exchanging UAV states in real time. We tackle this problem by exploiting a mean-field game (MFG) theoretic control method that requires the UAV state exchanges only once at the initial source. Afterwards, each UAV can control its acceleration by locally solving two partial differential equations (PDEs), known as the Hamilton-Jacobi-Bellman (HJB) and Fokker-Planck-Kolmogorov (FPK) equations. This approach, however, brings about huge computation energy for solving the PDEs, particularly under multi-dimensional UAV states. We address this issue by utilizing a machine learning (ML) method where two separate ML models approximate the solutions of the HJB and FPK equations. These ML models are trained and exploited using an online gradient descent method with low computational complexity. Numerical evaluations validate that the proposed ML aided MFG theoretic algorithm, referred to as MFG learning control, is effective in collision avoidance with low communication energy and acceptable computation energy.