 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication-Efficient Massive UAV Online Path Control: Federated Learning Meets Mean-Field Game Theory
Paper and Code
Mar 09, 2020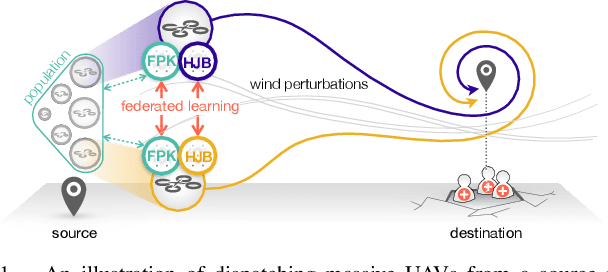
This paper investigates the control of a massive population of UAVs such as drones. The straightforward method of control of UAVs by considering the interactions among them to make a flock requires a huge inter-UAV communication which is impossible to implement in real-time applications. One method of control is to apply the mean-field game (MFG) framework which substantially reduces communications among the UAVs. However, to realize this framework, powerful processors are required to obtain the control laws at different UAVs. This requirement limits the usage of the MFG framework for real-time applications such as massive UAV control. Thus, a function approximator based on neural networks (NN) is utilized to approximate the solutions of Hamilton-Jacobi-Bellman (HJB) and Fokker-Planck-Kolmogorov (FPK) equations. Nevertheless, using an approximate solution can violate the conditions for convergence of the MFG framework. Therefore, the federated learning (FL) approach which can share the model parameters of NNs at drones, is proposed with NN based MFG to satisfy the required conditions. The stability analysis of the NN based MFG approach is presented and the performance of the proposed FL-MFG is elaborated by the simulations.