 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Simple Vision Algorithm for Detecting the Enzymic Browning Defects in Golden Delicious Apples
Oct 07, 2021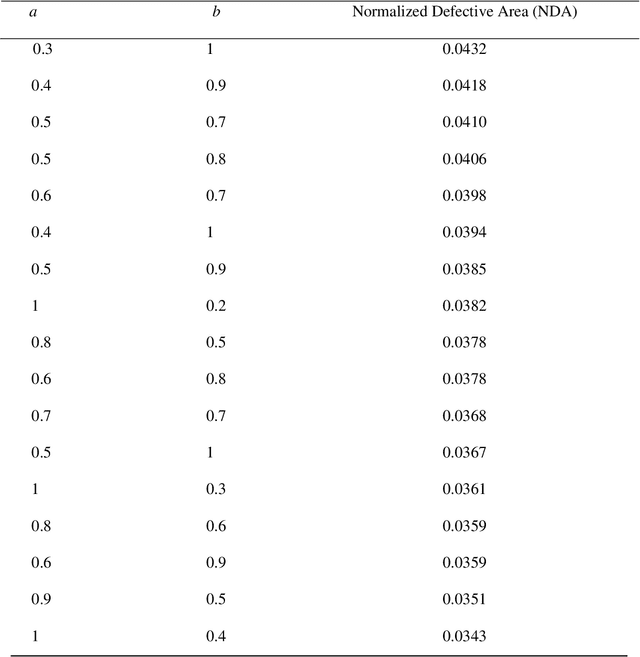

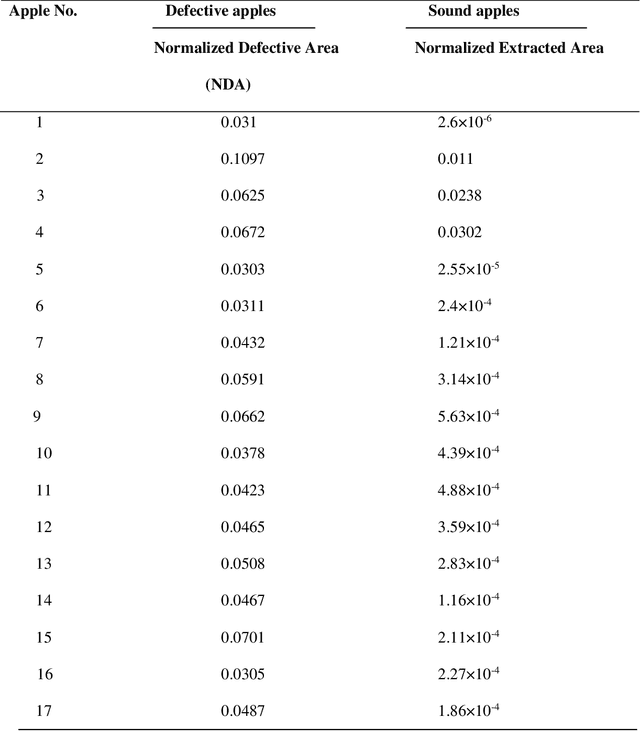

In this work, a simple vision algorithm is designed and implemented to extract and identify the surface defects on the Golden Delicious apples caused by the enzymic browning process. 34 Golden Delicious apples were selected for the experiments, of which 17 had enzymic browning defects and the other 17 were sound. The image processing part of the proposed vision algorithm extracted the defective surface area of the apples with high accuracy of 97.15%. The area and mean of the segmented images were selected as the 2x1 feature vectors to feed into a designed artificial neural network. The analysis based on the above features indicated that the images with a mean less than 0.0065 did not belong to the defective apples; rather, they were extracted as part of the calyx and stem of the healthy apples. The classification accuracy of the neural network applied in this study was 99.19%
Design of an Intelligent Vision Algorithm for Recognition and Classification of Apples in an Orchard Scene
Oct 07, 2021


Apple is one of the remarkable fresh fruit that contains a high degree of nutritious and medicinal value. Hand harvesting of apples by seasonal farmworkers increases physical damages on the surface of these fruits, which causes a great loss in marketing quality. The main objective of this study is focused on designing a robust vision algorithm for robotic apple harvesters. The proposed algorithm is able to recognize and classify 4-classes of objects found in an orchard scene including apples, leaves, trunk and branches, and sky into two apples and non-apples classes. 100 digital images of Red Delicious apples and 100 digital images of Golden Delicious apples were selected among 1000 captured images of apples from 18 apple gardens in West Azerbaijan, Iran. An image processing algorithm is proposed for segmentation and extraction of the image classes based on the color characteristics of mentioned classes. Invariant-Momentums were chosen as the extracted features from the segmented classes, e.g. apples. Multilayer Feedforward Neural Networks, MFNNs, were used as an artificial intelligence tool for the recognition and classification of image classes.
Vision based range and bearing algorithm for robot swarms
Mar 14, 2021
This paper presents a novel computer vision the algorithm proposed for the on-line range and bearing detection of the robot swarms. Results demonstrated the reliability of the proposed vision system such that it can be used for the robot swarms applications.
Design of a vision based range bearing and heading system for robot swarms
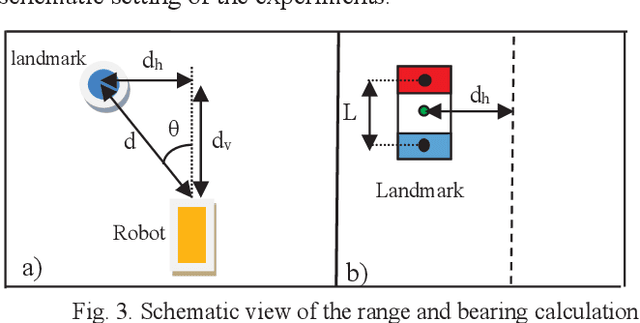
Mar 14, 2021An essential problem of swarm robotics is how members of the swarm knows the positions of other robots. The main aim of this research is to develop a cost-effective and simple vision-based system to detect the range, bearing, and heading of the robots inside a swarm using a multi-purpose passive landmark. A small Zumo robot equipped with Raspberry Pi, PiCamera is utilized for the implementation of the algorithm, and different kinds of multipurpose passive landmarks with nonsymmetrical patterns, which give reliable information about the range, bearing and heading in a single unit, are designed. By comparing the recorded features obtained from image analysis of the landmark through systematical experimentation and the actual measurements, correlations are obtained, and algorithms converting those features into range, bearing and heading are designed. The reliability and accuracy of algorithms are tested and errors are found within an acceptable range.