Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision based range and bearing algorithm for robot swarms
Paper and Code
Mar 14, 2021
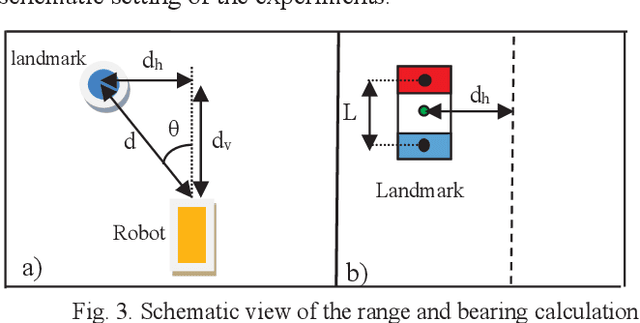
This paper presents a novel computer vision the algorithm proposed for the on-line range and bearing detection of the robot swarms. Results demonstrated the reliability of the proposed vision system such that it can be used for the robot swarms applications.
* 2 pages, 3 figures, 2018 Turkey Robotic Conference (TORK 2018)
View paper on