 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of an Intelligent Vision Algorithm for Recognition and Classification of Apples in an Orchard Scene
Paper and Code
Oct 07, 2021

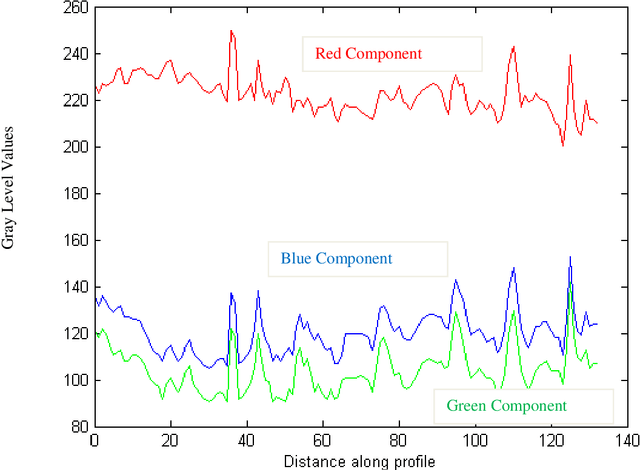

Apple is one of the remarkable fresh fruit that contains a high degree of nutritious and medicinal value. Hand harvesting of apples by seasonal farmworkers increases physical damages on the surface of these fruits, which causes a great loss in marketing quality. The main objective of this study is focused on designing a robust vision algorithm for robotic apple harvesters. The proposed algorithm is able to recognize and classify 4-classes of objects found in an orchard scene including apples, leaves, trunk and branches, and sky into two apples and non-apples classes. 100 digital images of Red Delicious apples and 100 digital images of Golden Delicious apples were selected among 1000 captured images of apples from 18 apple gardens in West Azerbaijan, Iran. An image processing algorithm is proposed for segmentation and extraction of the image classes based on the color characteristics of mentioned classes. Invariant-Momentums were chosen as the extracted features from the segmented classes, e.g. apples. Multilayer Feedforward Neural Networks, MFNNs, were used as an artificial intelligence tool for the recognition and classification of image classes.