 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Graph Configuration with Reinforcement Learning for Connected Autonomous Vehicle Trajectories
Oct 14, 2019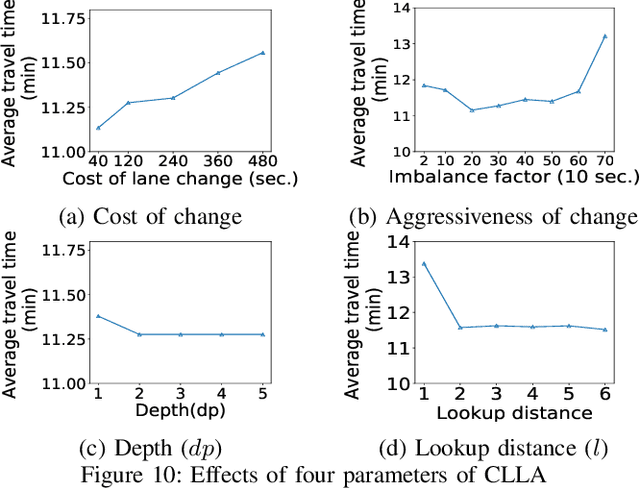
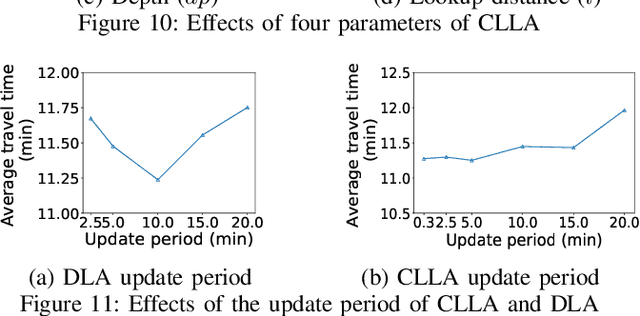
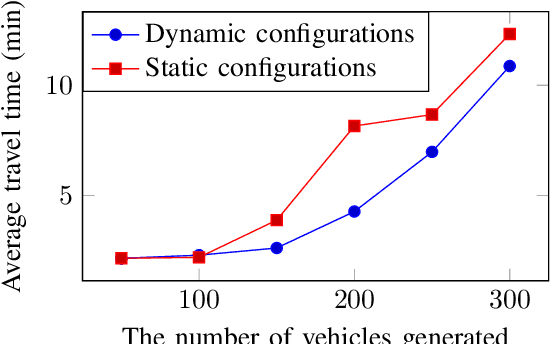

Traditional traffic optimization solutions assume that the graph structure of road networks is static, missing opportunities for further traffic flow optimization. We are interested in optimizing traffic flows as a new type of graph-based problem, where the graph structure of a road network can adapt to traffic conditions in real time. In particular, we focus on the dynamic configuration of traffic-lane directions, which can help balance the usage of traffic lanes in opposite directions. The rise of connected autonomous vehicles offers an opportunity to apply this type of dynamic traffic optimization at a large scale. The existing techniques for optimizing lane-directions are however not suitable for dynamic traffic environments due to their high computational complexity and the static nature. In this paper, we propose an efficient traffic optimization solution, called Coordinated Learning-based Lane Allocation (CLLA), which is suitable for dynamic configuration of lane-directions. CLLA consists of a two-layer multi-agent architecture, where the bottom-layer agents use a machine learning technique to find a suitable configuration of lane-directions around individual road intersections. The lane-direction changes proposed by the learning agents are then coordinated at a higher level to reduce the negative impact of the changes on other parts of the road network. Our experimental results show that CLLA can reduce the average travel time significantly in congested road networks. We believe our method is general enough to be applied to other types of networks as well.