 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAmmunition Component Classification Using Deep Learning
Aug 26, 2022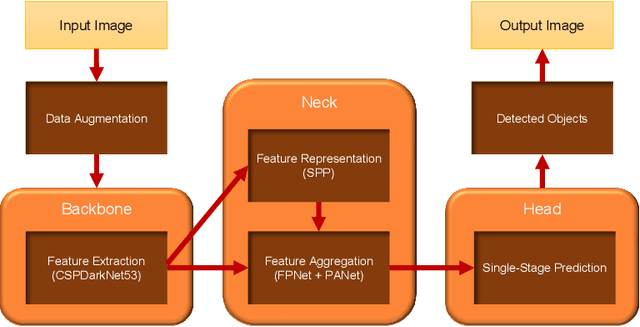
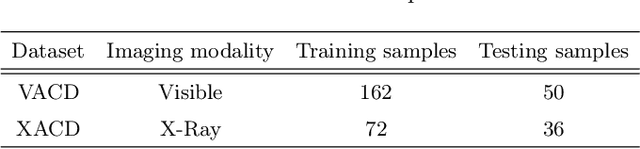
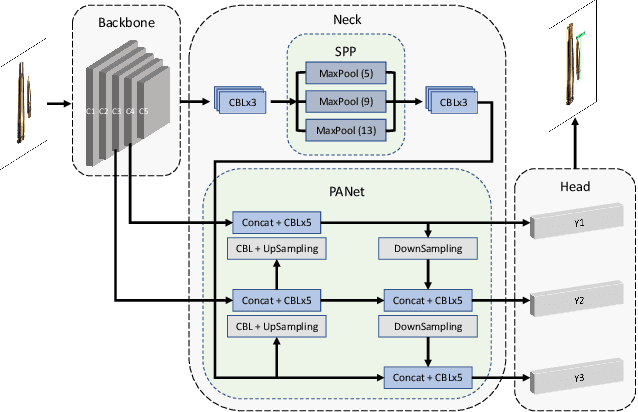
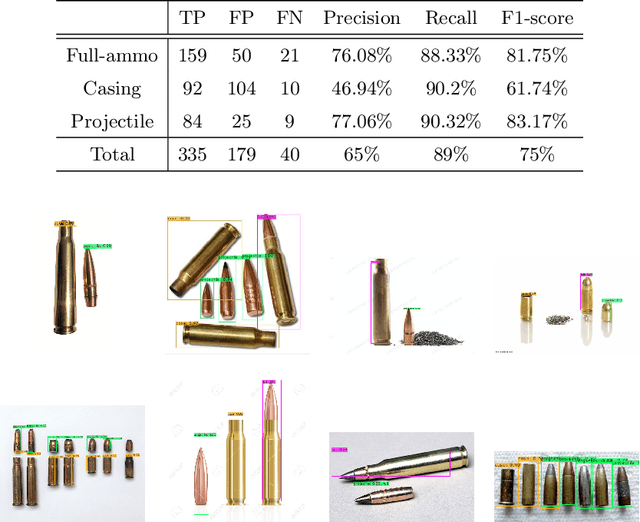
Ammunition scrap inspection is an essential step in the process of recycling ammunition metal scrap. Most ammunition is composed of a number of components, including case, primer, powder, and projectile. Ammo scrap containing energetics is considered to be potentially dangerous and should be separated before the recycling process. Manually inspecting each piece of scrap is tedious and time-consuming. We have gathered a dataset of ammunition components with the goal of applying artificial intelligence for classifying safe and unsafe scrap pieces automatically. First, two training datasets are manually created from visual and x-ray images of ammo. Second, the x-ray dataset is augmented using the spatial transforms of histogram equalization, averaging, sharpening, power law, and Gaussian blurring in order to compensate for the lack of sufficient training data. Lastly, the representative YOLOv4 object detection method is applied to detect the ammo components and classify the scrap pieces into safe and unsafe classes, respectively. The trained models are tested against unseen data in order to evaluate the performance of the applied method. The experiments demonstrate the feasibility of ammo component detection and classification using deep learning. The datasets and the pre-trained models are available at https://github.com/hadi-ghnd/Scrap-Classification.
* Conference: International Conference on Machine Learning and Data Mining MLDM 2022 link: http://www.ibai-publishing.org/html/proceedings_2022/pdf/proceedings_mldm_2022.pdf ISBN: 978-3-942952-93-4
Real-Time Accident Detection in Traffic Surveillance Using Deep Learning
Aug 12, 2022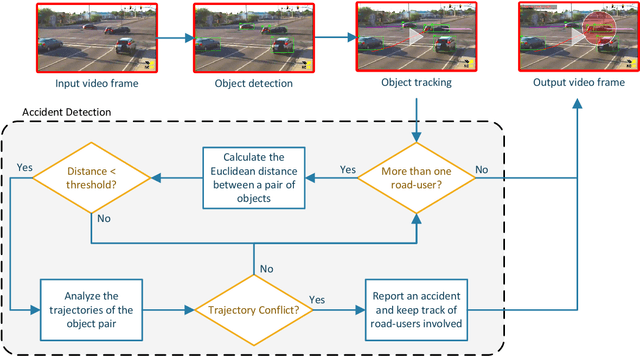
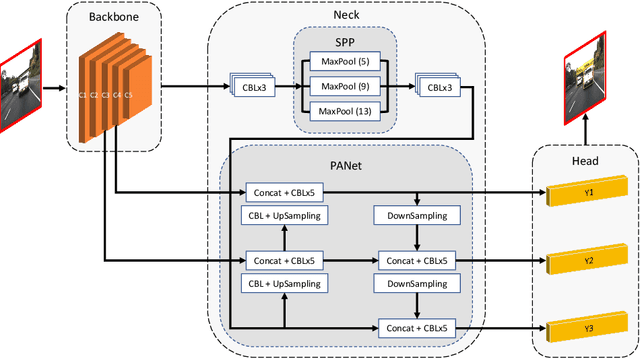

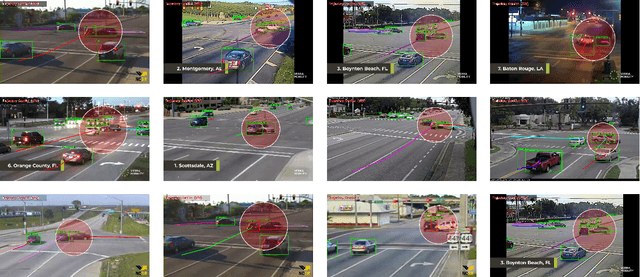
Automatic detection of traffic accidents is an important emerging topic in traffic monitoring systems. Nowadays many urban intersections are equipped with surveillance cameras connected to traffic management systems. Therefore, computer vision techniques can be viable tools for automatic accident detection. This paper presents a new efficient framework for accident detection at intersections for traffic surveillance applications. The proposed framework consists of three hierarchical steps, including efficient and accurate object detection based on the state-of-the-art YOLOv4 method, object tracking based on Kalman filter coupled with the Hungarian algorithm for association, and accident detection by trajectory conflict analysis. A new cost function is applied for object association to accommodate for occlusion, overlapping objects, and shape changes in the object tracking step. The object trajectories are analyzed in terms of velocity, angle, and distance in order to detect different types of trajectory conflicts including vehicle-to-vehicle, vehicle-to-pedestrian, and vehicle-to-bicycle. Experimental results using real traffic video data show the feasibility of the proposed method in real-time applications of traffic surveillance. In particular, trajectory conflicts, including near-accidents and accidents occurring at urban intersections are detected with a low false alarm rate and a high detection rate. The robustness of the proposed framework is evaluated using video sequences collected from YouTube with diverse illumination conditions. The dataset is publicly available at: http://github.com/hadi-ghnd/AccidentDetection.
* link to IEEE: https://ieeexplore.ieee.org/abstract/document/9827736