 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Accident Detection in Traffic Surveillance Using Deep Learning
Paper and Code
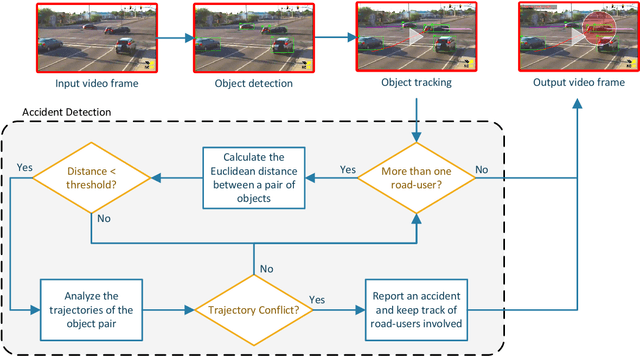
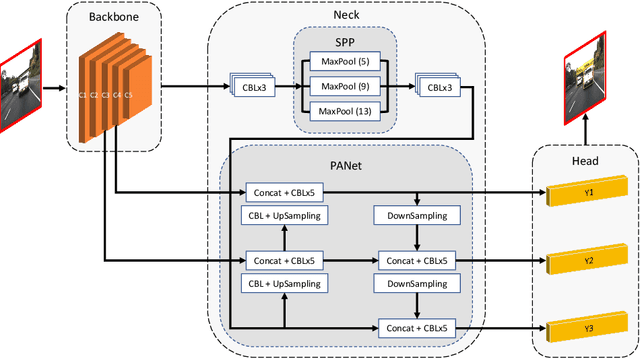

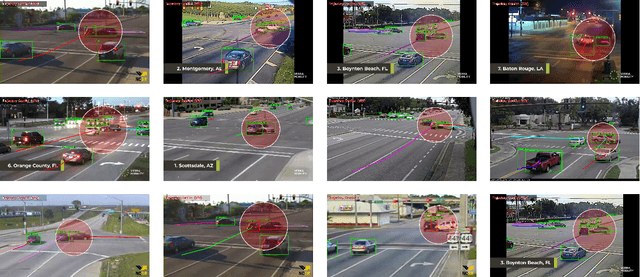
Automatic detection of traffic accidents is an important emerging topic in traffic monitoring systems. Nowadays many urban intersections are equipped with surveillance cameras connected to traffic management systems. Therefore, computer vision techniques can be viable tools for automatic accident detection. This paper presents a new efficient framework for accident detection at intersections for traffic surveillance applications. The proposed framework consists of three hierarchical steps, including efficient and accurate object detection based on the state-of-the-art YOLOv4 method, object tracking based on Kalman filter coupled with the Hungarian algorithm for association, and accident detection by trajectory conflict analysis. A new cost function is applied for object association to accommodate for occlusion, overlapping objects, and shape changes in the object tracking step. The object trajectories are analyzed in terms of velocity, angle, and distance in order to detect different types of trajectory conflicts including vehicle-to-vehicle, vehicle-to-pedestrian, and vehicle-to-bicycle. Experimental results using real traffic video data show the feasibility of the proposed method in real-time applications of traffic surveillance. In particular, trajectory conflicts, including near-accidents and accidents occurring at urban intersections are detected with a low false alarm rate and a high detection rate. The robustness of the proposed framework is evaluated using video sequences collected from YouTube with diverse illumination conditions. The dataset is publicly available at: http://github.com/hadi-ghnd/AccidentDetection.