 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDReyeVR: Democratizing Virtual Reality Driving Simulation for Behavioural & Interaction Research
Jan 07, 2022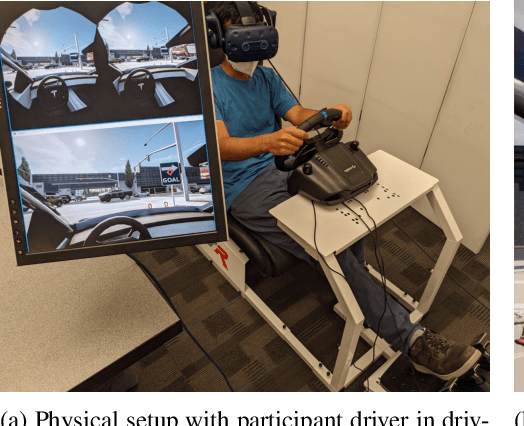
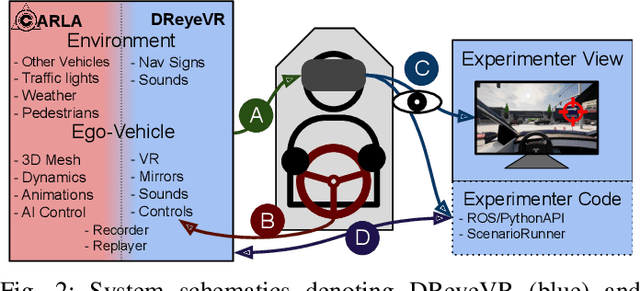
Simulators are an essential tool for behavioural and interaction research on driving, due to the safety, cost, and experimental control issues of on-road driving experiments. The most advanced simulators use expensive 360 degree projections systems to ensure visual fidelity, full field of view, and immersion. However, similar visual fidelity can be achieved affordably using a virtual reality (VR) based visual interface. We present DReyeVR, an open-source VR based driving simulator platform designed with behavioural and interaction research priorities in mind. DReyeVR (read "driver") is based on Unreal Engine and the CARLA autonomous vehicle simulator and has features such as eye tracking, a functional driving heads-up display (HUD) and vehicle audio, custom definable routes and traffic scenarios, experimental logging, replay capabilities, and compatibility with ROS. We describe the hardware required to deploy this simulator for under $5000$ USD, much cheaper than commercially available simulators. Finally, we describe how DReyeVR may be leveraged to answer an interaction research question in an example scenario.
SocNavBench: A Grounded Simulation Testing Framework for Evaluating Social Navigation
Feb 26, 2021
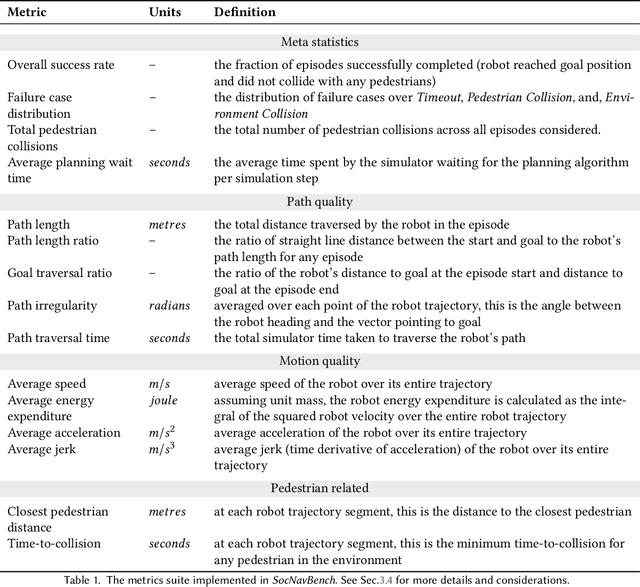


The human-robot interaction (HRI) community has developed many methods for robots to navigate safely and socially alongside humans. However, experimental procedures to evaluate these works are usually constructed on a per-method basis. Such disparate evaluations make it difficult to compare the performance of such methods across the literature. To bridge this gap, we introduce SocNavBench, a simulation framework for evaluating social navigation algorithms. SocNavBench comprises a simulator with photo-realistic capabilities and curated social navigation scenarios grounded in real-world pedestrian data. We also provide an implementation of a suite of metrics to quantify the performance of navigation algorithms on these scenarios. Altogether, SocNavBench provides a test framework for evaluating disparate social navigation methods in a consistent and interpretable manner. To illustrate its use, we demonstrate testing three existing social navigation methods and a baseline method on SocNavBench, showing how the suite of metrics helps infer their performance trade-offs. Our code is open-source, allowing the addition of new scenarios and metrics by the community to help evolve SocNavBench to reflect advancements in our understanding of social navigation.